
Back to Products
Seesaw
Electromechanical Control
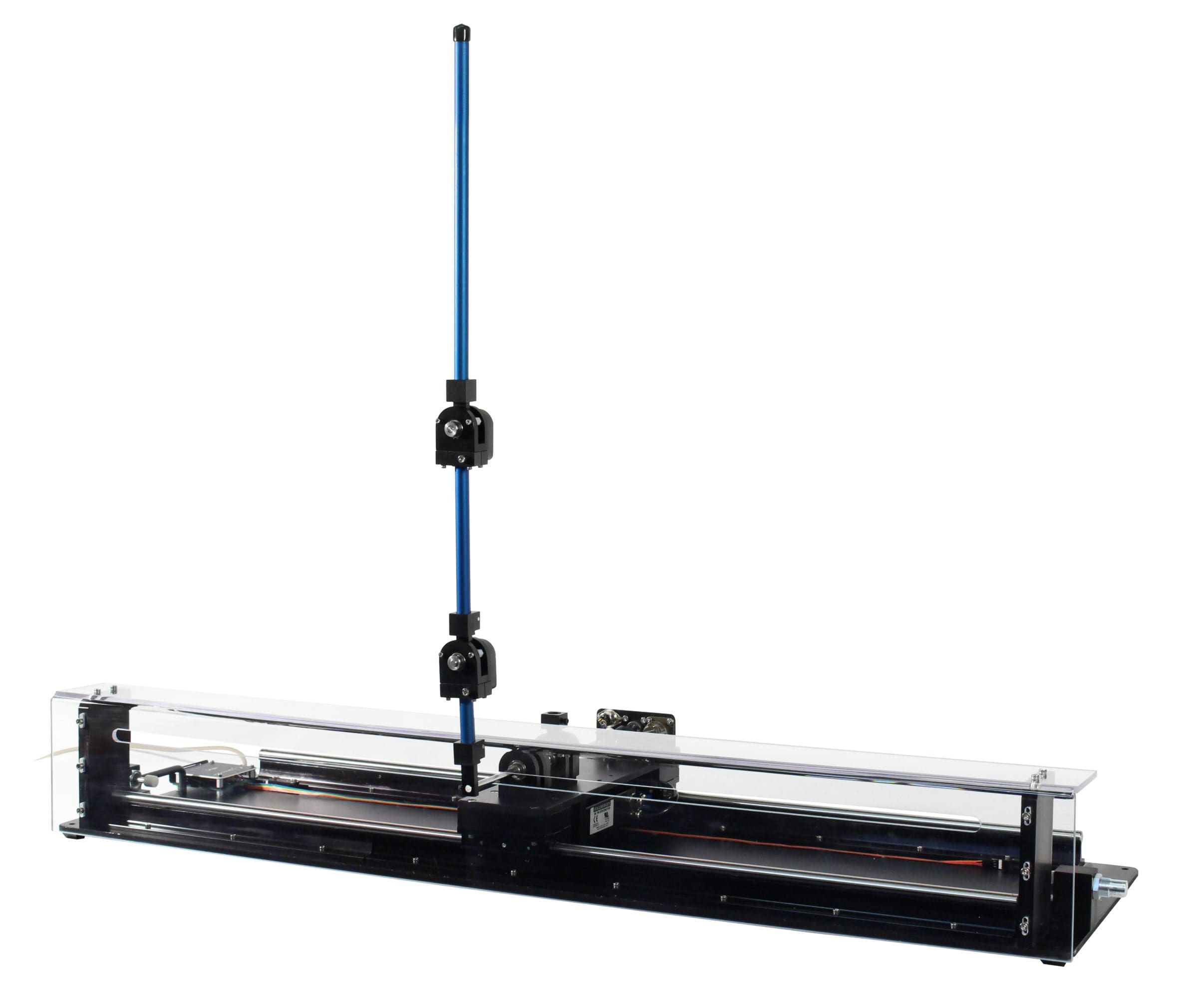
The Seesaw module is ideal to introduce intermediate control concepts, involving dynamics and control similar to the inverted pendulum experiment. You can use it to demonstrate real-world control challenges related, for example, to the roll control in aircraft.
Gallery

Product Details
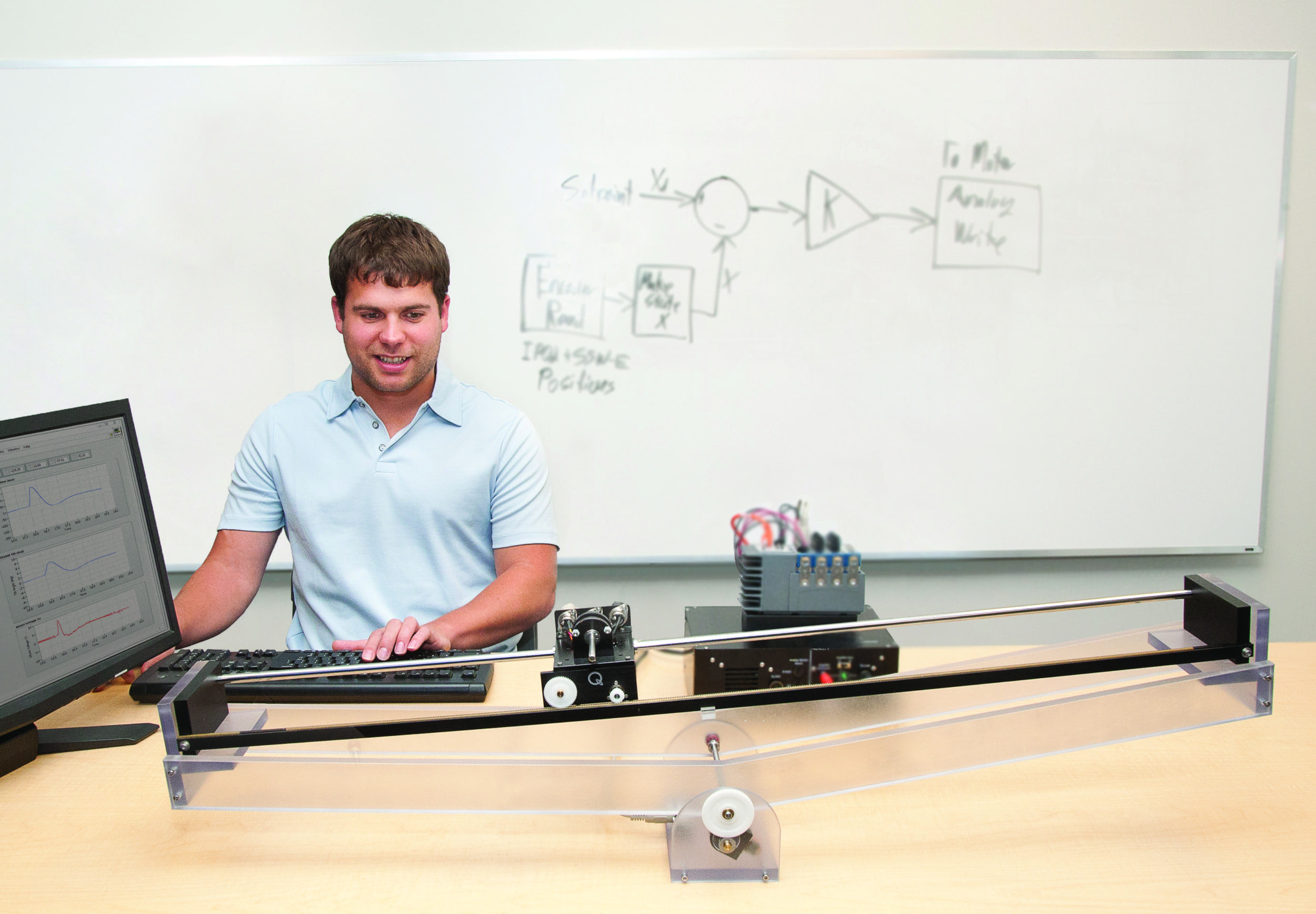
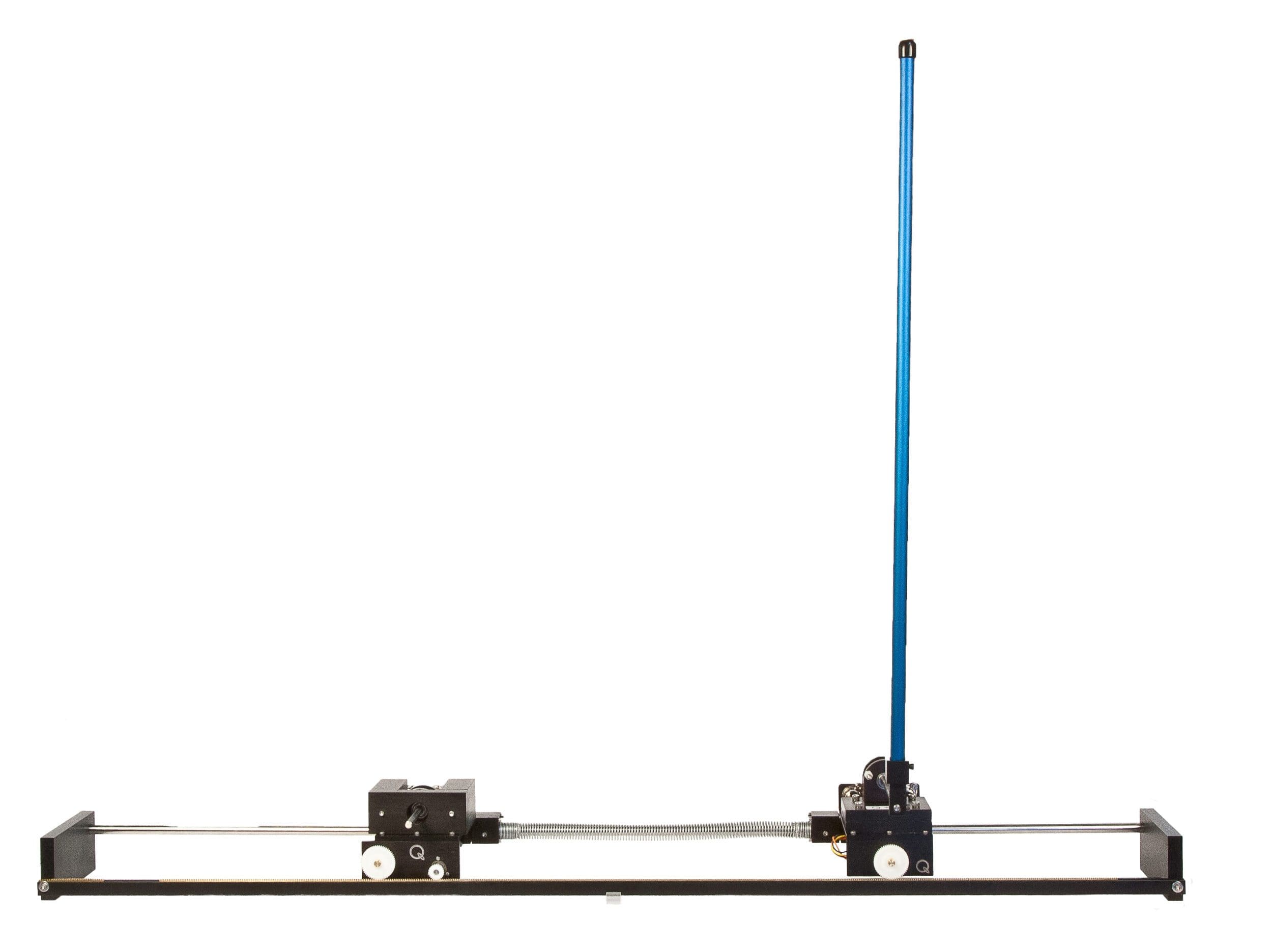
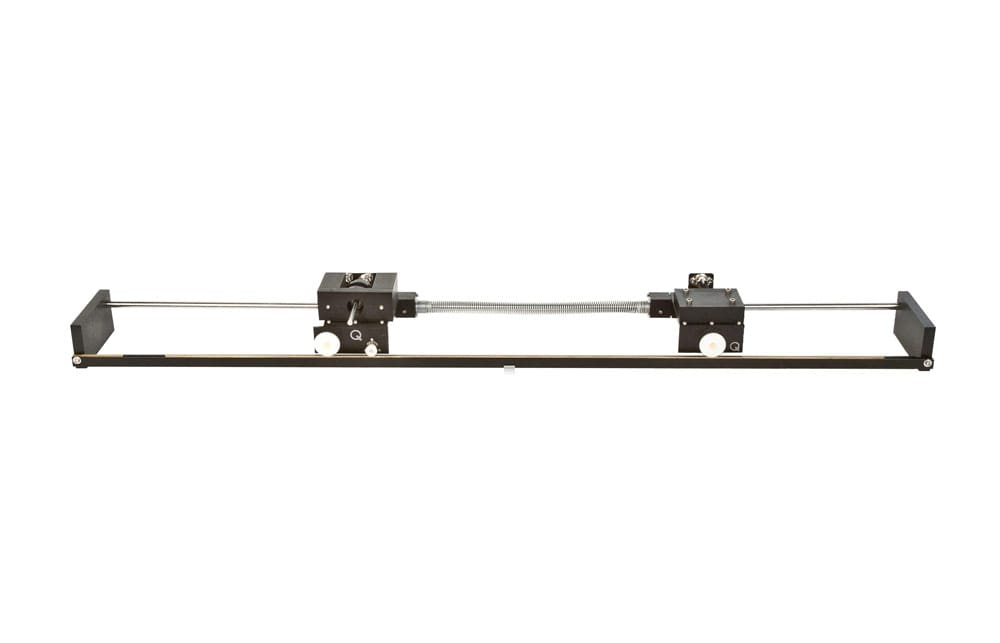
The Seesaw module consists of two long arms hinged onto a support fulcrum. The system is composed of precisely machined polycarbonate with a durable matte finish. The Seesaw rotates about the pivot axis on an instrumented fulcrum. The rotation axis is coupled to an encoder through a pinion-and-anti-backlash-gear system and is used to measure the Seesaw tilt angle.
- High-resolution optical encoder to sense cart position
- High-quality aluminum and precision-crafted parts
- Easy-connect cables and connectors
- Pendulum attachment supplied with Seesaw module (pendulum for the Seesaw Pendulum experiment must be purchased separately)
| Dimensions (L x D x H) | 112 cm x 20 cm x 40 cm |
| System mass (Seesaw and Linear Servo Base Unit together) | 3.6 kg |
| Seesaw geartrain gear ratio | 3 |
| Angle range about flat horizontal surface | ±11.5 deg |
| Distance from pivot to the Linear Servo Base Unit track | 12.5 cm |
| Distance from pivot to COG | 5.8 cm |
| Seesaw encoder resolution | 0.0015 rad/count |
Modeling Topics
- Derivation of dynamic model using Lagrange
- Linearization
Control Topics
- State-space representation
- Linear-quadratic regulator (LQR)
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Linear Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Linear Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with Quanser Q1-cRIO
- NI myRIO with Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
| Dimensions (L x D x H) | 112 cm x 20 cm x 40 cm |
| System mass (Seesaw and Linear Servo Base Unit together) | 3.6 kg |
| Seesaw geartrain gear ratio | 3 |
| Angle range about flat horizontal surface | ±11.5 deg |
| Distance from pivot to the Linear Servo Base Unit track | 12.5 cm |
| Distance from pivot to COG | 5.8 cm |
| Seesaw encoder resolution | 0.0015 rad/count |
Related Case Studies
Related Products
Electromechanical Control
Linear Flexible Joint with Inverted Pendulum
The Linear Flexible Joint with Inverted Pendulum is an ideal way to introduce intermediate control concepts related to vibration analysis...
High Fidelity Linear Cart System
This product is no longer available.
The High Fidelity Linear Cart is ideally suited to introduce advanced control concepts and theories relevant to real world applications...
Electromechanical Control
Linear Flexible Joint
Teach the fundamentals of dynamics and control
The Linear Flexible Joint is a passive linear cart that connects to the Linear Servo Base Unit through a linear...
