
Back to Products
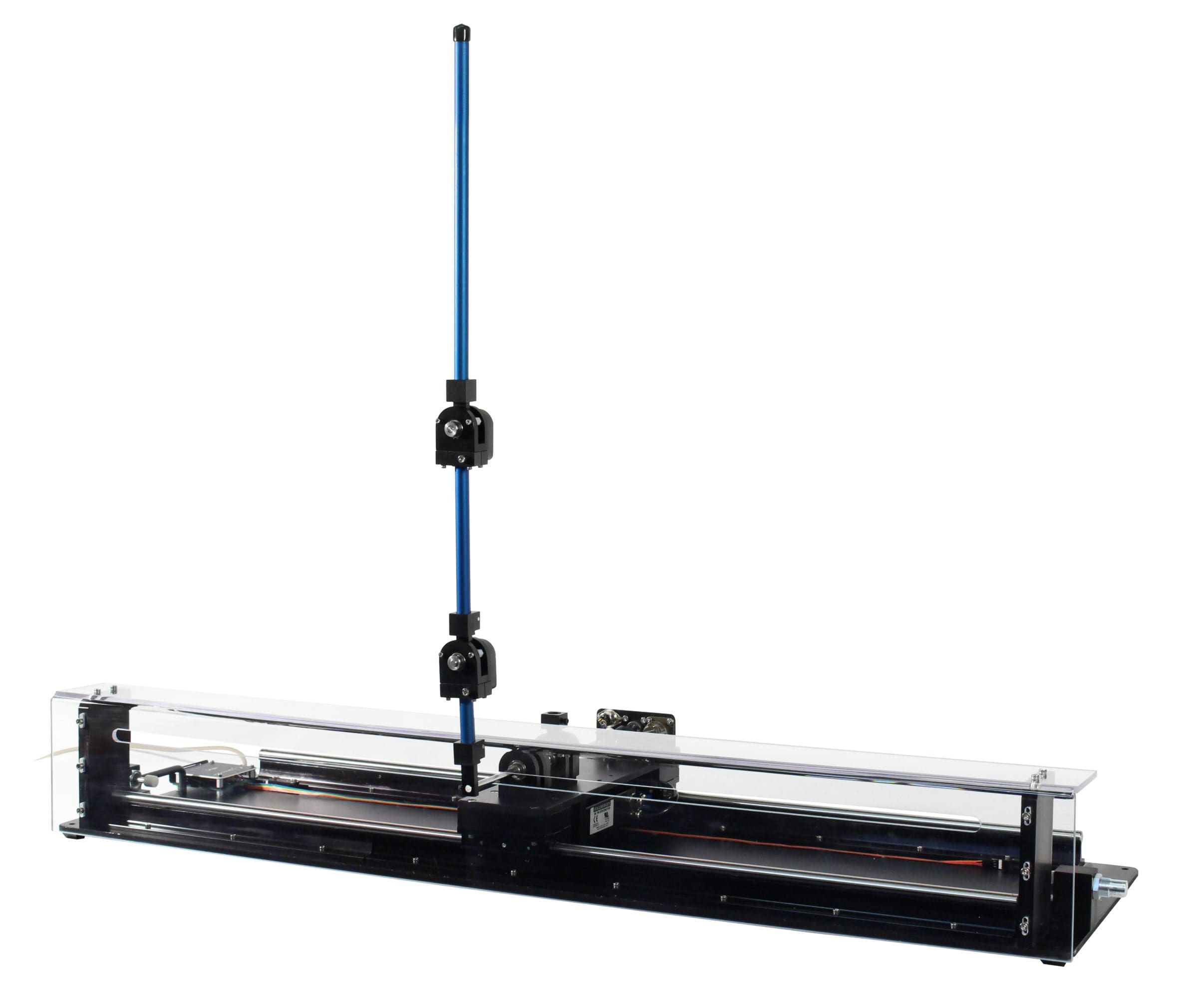
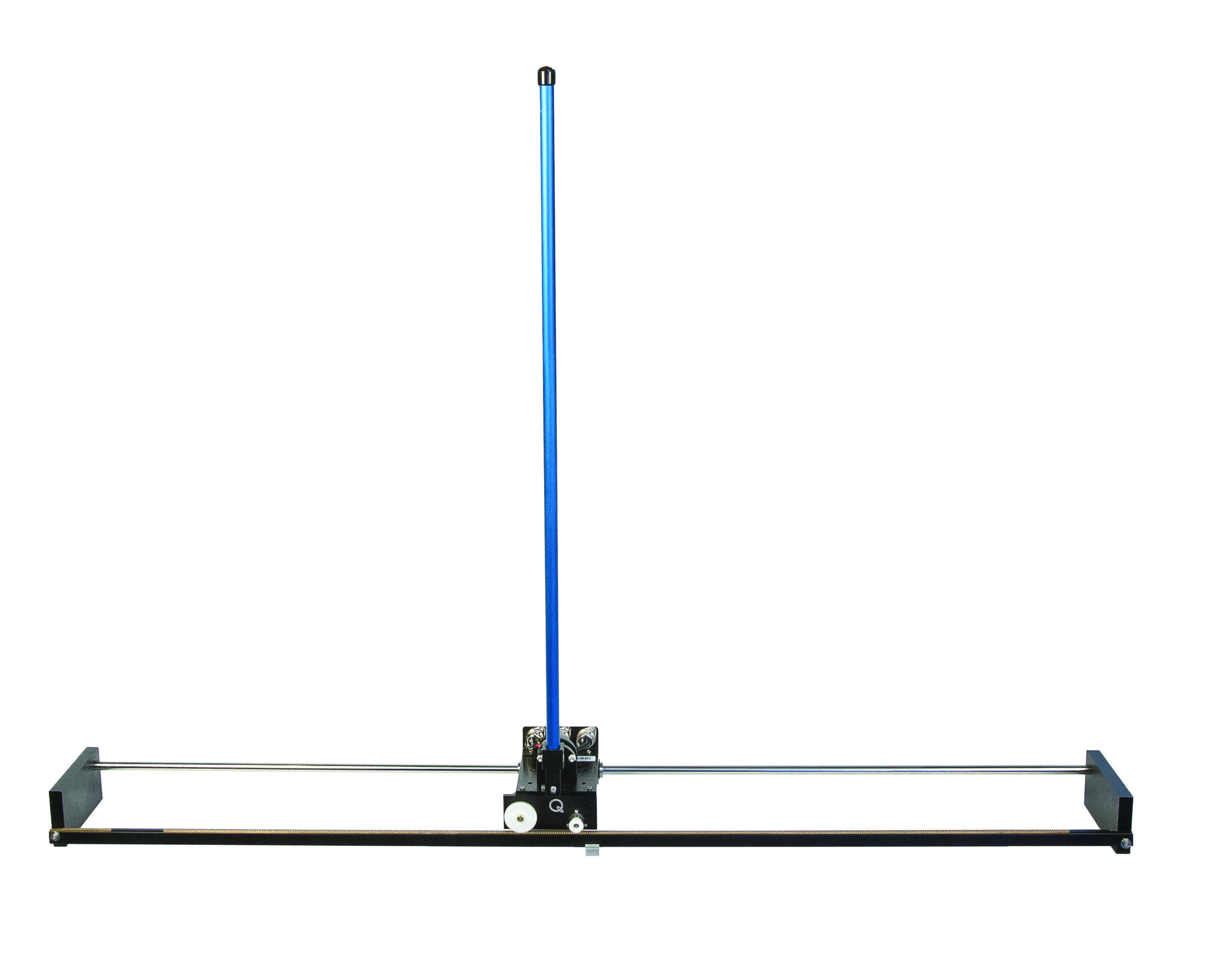
Linear Double Inverted Pendulum
Take the classic linear control problem to the next level
Electromechanical Control
Designing a controller that balances two links adds an extra challenge when compared to the single inverted pendulum system. The additional challenge of a second pendulum can be used to demonstrate advanced controls concepts, or as a basis for research.

Gallery


Product Details
The double inverted pendulum represents a complex challenge with real-world applications that include stabilizing the takeoff of a multi-stage rocket and modeling the human posture system.
| Mass of linear double pendulum assembly | 0.364 kg |
| Medium pendulum mass (with T-fitting) | 0.127 kg |
| Medium pendulum length (pivot to tip) | 33.65 cm |
| Short pendulum mass (with T-fitting) | 0.097 kg |
| Short pendulum length (pivot to tip) | 20.0 cm |
| Mass of encoder hinge | 0.141 kg |
| Pendulum encoder resolution (in quadrature) | 4096 counts/rev |
Modeling Topics
- Derivation of dynamic model using Lagrange
- State-space representation
- Linearization
Control Topic
- Linear-quadratic regulator (LQR)
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Linear Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Linear Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with two Quanser Q1-cRIO modules
- Quanser Q8-USB
- Quanser QPIDe
Related Products

Electromechanical Control
Linear Flexible Inverted Pendulum
The Linear Flexible Inverted Pendulum module augments the classic inverted pendulum challenge by including a flexible link that requires balancing....
High Fidelity Linear Cart System
This product is no longer available.
The High Fidelity Linear Cart is ideally suited to introduce advanced control concepts and theories relevant to real world applications...
Electromechanical Control
Linear Servo Base Unit with Inverted Pendulum
A modular lab platform for teaching robotics, mechatronics, and controls
The Linear Servo Base Unit is the fundamental unit for the Quanser linear motion platform. It is ideally suited to...