Rotary Double Inverted Pendulum
Take the classic inverted pendulum challenge to the next level
The Rotary Double Inverted Pendulum module is ideal to introduce intermediate and advanced control concepts, taking the classic single inverted pendulum challenge to the next level of complexity. You can use it to demonstrate real-world control challenges related, for example, to takeoff stabilization of a multi-stage rocket. The Rotary Double Inverted Pendulum module ... more

Gallery

Product Details
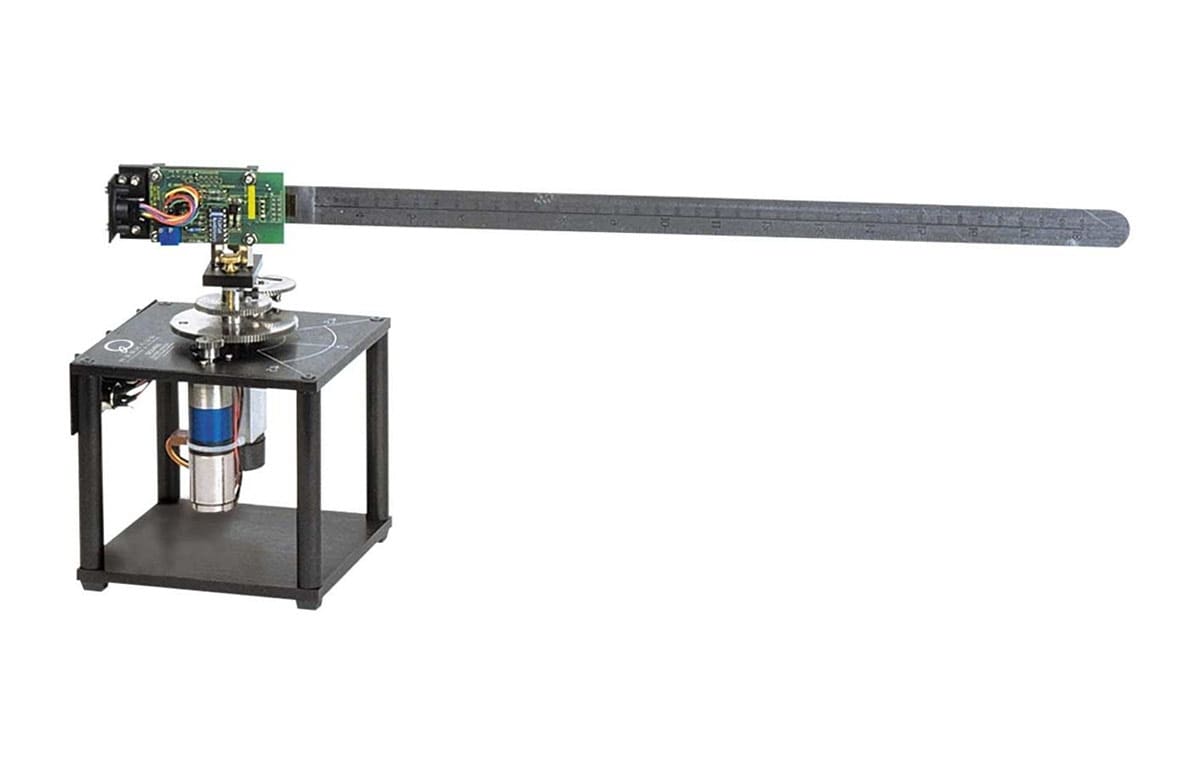
The Double Inverted Pendulum module is composed of a rotary arm that attaches to the Rotary Servo Base Unit, a short 7-inch bottom blue rod, an encoder hinge, and the top 12-inch blue rod. The balance control computes a voltage based on the angle measurements from the encoders. This control voltage signal is amplified and applied to the Servo motor. The rotary arm moves accordingly to balance the two links and the process repeats itself.
- Double pendulum comprised of a 7-inch aluminum link connected to a 12-inch link
- Double Inverted Pendulum module easily attaches to the Rotary Servo Base Unit
- High resolution encoders sense rotary arm and pendulum link angles
| Rotary arm length (pivot to tip) | 21.59 cm |
| Rotary arm mass | 0.2570 kg |
| Short pendulum mass (with T-fitting) | 0.097 kg |
| Short pendulum length (pivot to tip) | 20.0 cm |
| Medium pendulum mass (with T-fitting) | 0.127 kg |
| Medium pendulum length (pivot to tip) | 33.65 cm |
| Pendulum encoder resolution (in quadrature) | 4096 counts/rev |
Modeling Topics
- Lagrange derivation
- State-space representation
- Linearization
Control Topics
- Linear-quadratic regulator
The following additional components are required to complete your workstation, and are sold separately:
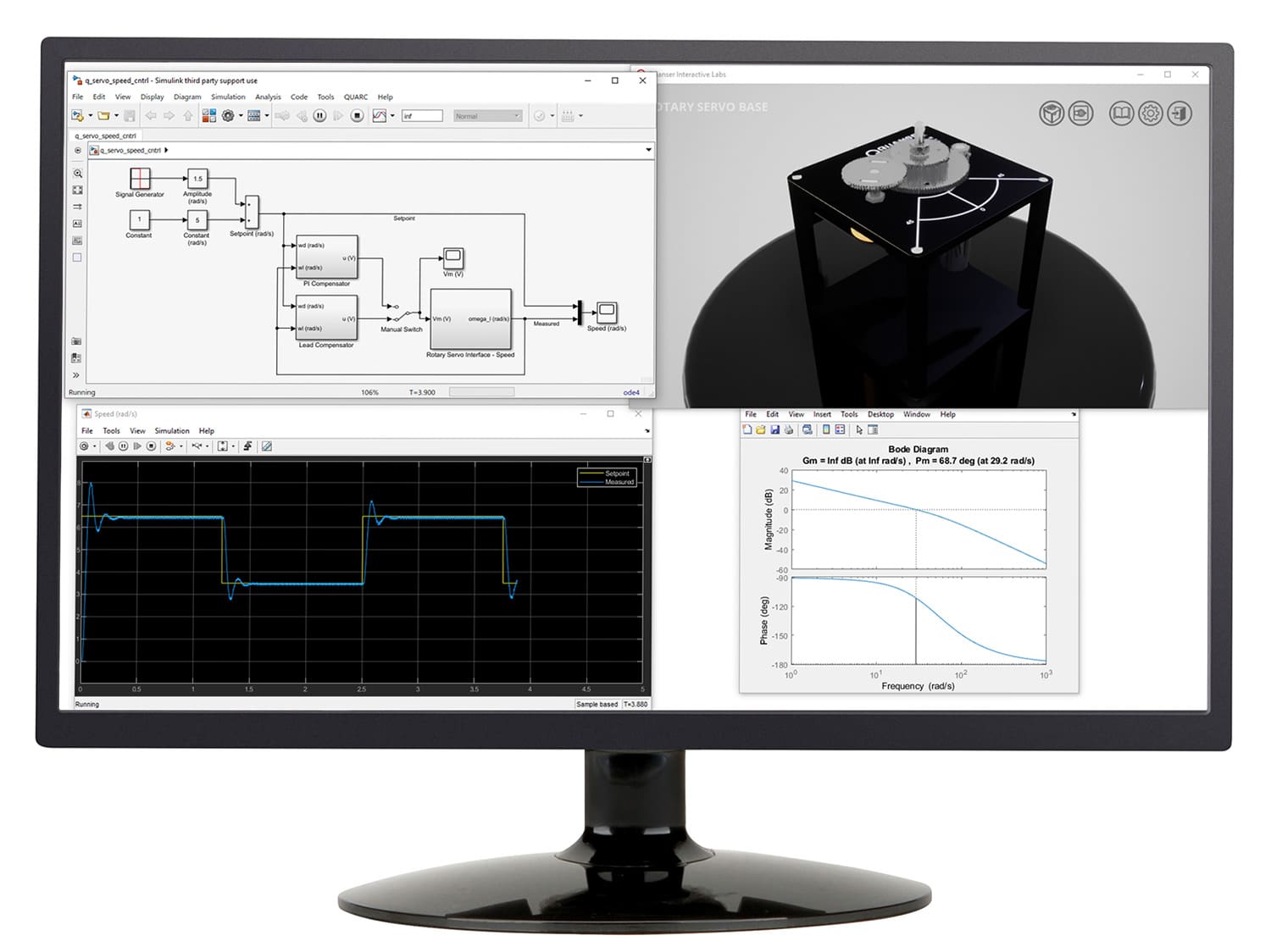
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Rotary Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Rotary Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with two Quanser Q1-cRIO modules
- NI myRIO with Quanser Terminal Board
- Quanser Q8-USB
- Quanser QPIDe
Related Products



Rotary Servo Base Unit
Foundational modular control experiment

QUBE – Servo 2
Versatile teaching platform for controls and mechatronics