
Prior to joining Quanser I was a graduate student at U of T’s Institute for Aerospace Studies. In this blog I thought I share my experience taking their Robotics (AER 525) course as a grad student as well as developing content for the same course as an R&D engineer a few years later.
Short Summary of AER 525 Robotics
Robotics (AER525) is a course offered primarily for senior and graduate ECE, MIE, and EngSci students. In the course, students study forward/inverse kinematics, differential kinematics, path planning, torque control, and other classic robotics topics that can be implemented on a manipulator. The course outcome is to ensure students have the knowledge to work on industrial manipulators as well as drones, self-driving cars, ground vehicles, and so on. This is a typical engineering course consisting of lectures, assignments, exams, and laboratory exercises. The goal of the labs – which are conducted at the Robotics Laboratory – is to put the theoretical component of the course into practice.
Thoughts on AER525 From a Student Perspective
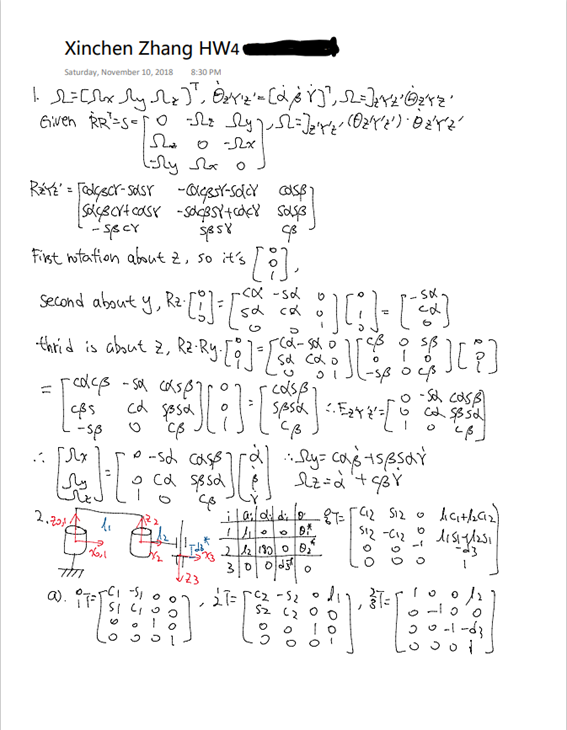
I was a graduate student at the University of Toronto in 2019 studying aerial robotics, and I happened to take this course. When I first read the course syllabus, I thought I had learned some of the topics during my undergrad. However, I was still very excited to take the course to learn additional topics related to robotic arms. The course structure was no different from my other engineering courses. The lectures were on Tuesdays and Thursdays, where I would take notes, ask some questions, and then went home to complete the assignments. When weeks passed by, I would start to worry about the exams and spent much time calculating how much more percentage I needed to secure an A in this course based on its grading scheme! The study process involved a considerable amount of theory, formula derivation, and calculation.
 |
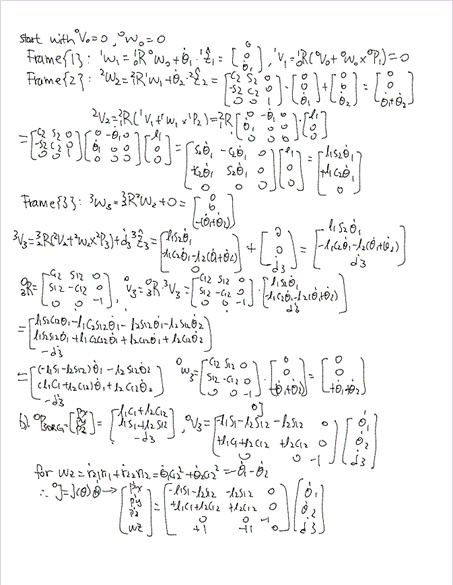 |
Assignment involving formula derivation and calculation.
The lab component of the course was designed to help students make practical sense of the theory. However, there was a problem with the hands on component of the course. With more than 50 students enrolled, we were split into groups and only had the opportunity to enter the lab every other week because of the large class size. The manipulators were aged, but we still used them to validate some of the topics we learned in the lecture, like forward and inverse kinematics. Unfortunately, the more advanced topics like singularity identification/avoidance only remained on the theory level due to performance limitation of the manipulators in the lab. As a student I thought I had a good understanding of manipulator theory, and generally saw it as a satisfactory engineering course.
Now From a Course Developer Point of View
After graduation I was excited to join Quanser, a company that has focused on engineering education for over 30 years. When the COVID-19 pandemic resulted in cancellation of in-person classes at the University of Toronto, like many other universities around the world U of T started to look for ways to offer courses remotely, and AER525 was no exception. Given our good relationship with U of T, they reached out to us see how the lab component of AER 525 can be taught remotely without compromising the student experience. Luckily, we had just released QLabs Virtual QArm, the virtual twin on our latest robotic manipulator the QArm. And I was equally lucky to be part of the team that developed the courseware that went along with this product offering! In fact, my experience taking AE R525 (as well as the lead course developer’s experience) shaped how we developed the QArm curriculum.
With the QLabs virtual product line, our goal was to develop a simulated environment with high accuracy and fidelity that students could access anywhere at any time. This could not have come at a better time with the restrictions brought on by the pandemic that limited access to lab equipment. At many universities online courses were limited to showing videos of hardware or creating simple simulations, but we had solved that issue brilliantly and elegantly – if I may say so myself! As with all our teaching products, our virtual lab experiments cover numerous theoretical topics that students then explore using a realistic rendering of our physical system with almost identical dynamics to that of the real hardware. Best of all, no lab supervisor or pre-lab safety instructions are required! Students could safely conduct many labs that otherwise could be dangerous in the physical lab, such as PWM and singularity identification and avoidance.
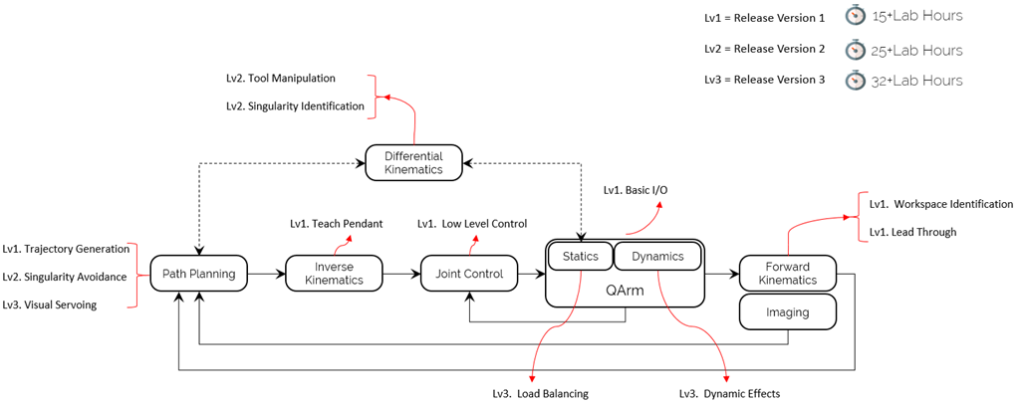
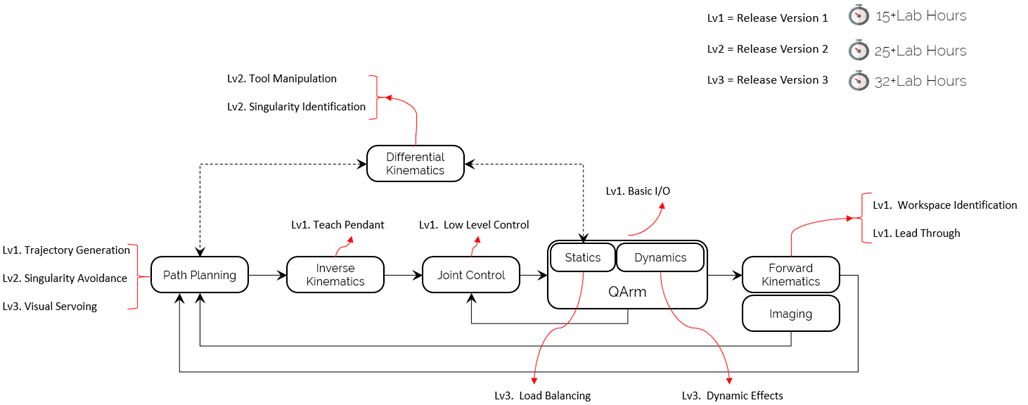
QArm curriculum design chart.
At Quanser we believe that a well-designed engineering course should help students in their future growth. Therefore, each Virtual QArm lab not only covers typical manipulator theory but also establishes a connection with an industrial application or a current research topic. For example, for differential kinematics, we have designed a lab that the QArm would mimic the operation of a paint-spreading manipulator to help students better understand the importance of differential kinematics. Likewise, a popular research topic such as visual servoing is covered in the Virtual QArm’s path planning lab. I should also mention that one of the key features of the offering is that it the digital twin is fully compatible with MATLAB®/Simulink®.
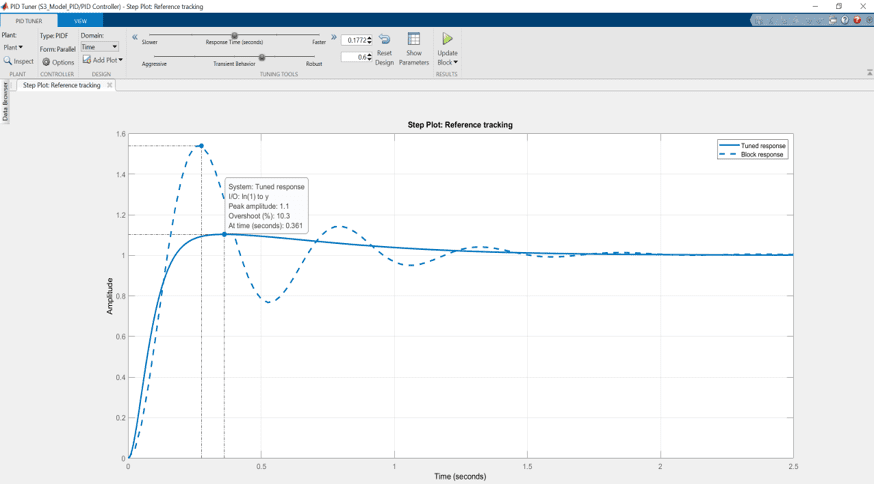
Virtual QArm demo using Simulink.
Some Final Words
In this blog, I briefly talked about the design of AER 525 from a student and a course developer’s point of view. Because of its breadth and depth, obviously I cannot show the amount of work and energy we have spent on QArm curriculum just in one blog. Also, I’m not the only engineer who took AER 525 at Quanser. From the product manager to the academic lead, a few developers, we have all taken this course in different years. When designing the curriculum we genuinely wanted to give students a better academic journey based on our experience having taken AER 525.
Now that the new AER525 course has been taught successfully for a year, we’ve received many positive feedback from the students saying this course was the best engineering course they’ve taken. At Quanser we strongly believe that a course designed with digital twin technology is not a solution just during a pandemic. Indeed, it is a new mode of teaching. Digital twinning solves typical problems such a high cost when building a new robotics lab as well as access limitations. Not only the University of Toronto, but also McMaster University, York University, University of Calgary, Queen’s University and many other schools around the globe have incorporated QLabs in their long-term teaching plans.