
Imagine testing complex robotic algorithms without the risk of hardware damage, with multiple heterogenous robots simultaneously, and creating diverse scenarios at the click of a button. Let’s explore how this can be done using the virtual robotics simulation platform: Quanser Interactive Labs (QLabs).
What is Quanser Interactive Labs?
QLabs is a cutting-edge virtual robotics simulation platform built on Unreal Engine that transforms how researchers and students develop and test different scenarios and algorithms using Quanser’s robots. Having access to a robust digital twin of Quanser systems allows users to engage with curriculum directly on student laptops, at any convenient time or location, keeping them engaged and able to develop without requiring hardware on hand.
Traditional robotics research presents significant challenges: limited lab hours, the risk of hardware damage, and complex setup processes. QLabs removes these barriers by providing digital twins that match the kinematics and dynamics of real‑world Quanser hardware systems. This allows virtual tests to transition to hardware with minimal modifications.
QLabs offers two unique environments; fixed workspaces, such as ones for the Qube Servo, Aero or QArm; and open worlds for our autonomous systems, QBot Platform, QCar 2 and QDrone 2. These open worlds allow us to place a robot in an environment and be able to modify the space to whatever the research needs are.

Quanser’s Virtual Autonomous Systems
In this blog, we will primarily focus on Quanser’s autonomous systems digital twins in QLabs, which are great for any type of project. By using a virtual robotics simulation platform like QLabs, users can create complex scenarios in the open world in a short time frame. This could include navigating a maze, avoiding pedestrians or operating in a city environment without needing a physical setup. With simple code, you can add objects such as road signage, obstacles or even people and animals walking around.
This is especially useful when testing code that might cause the robot to crash into the environment, saving time on fixing damaged hardware and preserving the robot’s surrounding environment. Unlike physical labs limited by space and resources, QLabs lets multiple robots interact simultaneously. Imagine testing swarm behavior, collaborative navigation, or complex multi‑robot algorithms with just a few clicks.
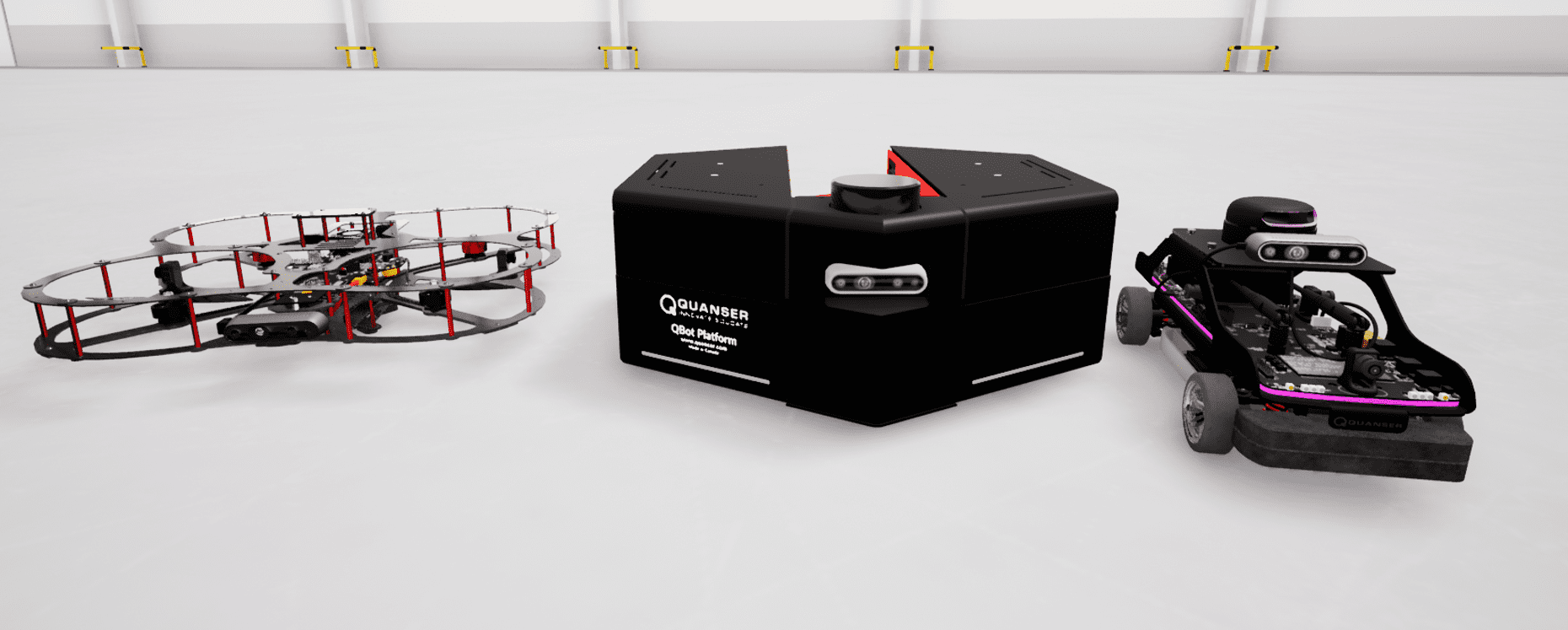
One of the main benefits of using Quanser’s products and QLabs is that it supports simultaneous hardware and virtual operation for digital twinning, allowing the user to integrate information from the real world into the virtual environment in real‑time. Additionally, user can develop and test using QLabs, and rapidly port the code to hardware, which simplifies final deployment. Let’s check out how numerous digital autonomous systems can work together with examples featuring our virtual Qbot Platform, virtual QCar 2 and virtual QDrone 2!
Virtual QBot Platform
QBot Platform’s released curriculum can be deployed on both hardware and virtual systems, allowing students to complete their labs at home. They have access to not only the robot but the complete replica of the environment resources that come with it, all in a virtual space. You can have as many objects in how much ever space as you require, allowing users to create their own environments: like a maze, or adding people or objects around to test how their robot would navigate these scenarios. Even making multiple robots work together or doing similar tasks. Here is an example of a custom driving scenario with virtual QBot Platform environment mats and 3 QBot Platforms engaged in line following tasks.
3 virtual QBot Platforms running the Line Following lab. (Video at 1.33x speed)
Virtual QCar 2
One of our latest virtual platforms is QCar 2, which has support for all curriculum released for the physical QCar 2. This means that if the physical space in a lab is not available to set up or is being used for research, students can test the virtual cityscape or build their own virtual space to test the QCar 2. This is doable with a virtual full scale replica of a QCar 2 (that is a 1/10th of a full vehicle) but also test it as a full-sized vehicle (and 10 times the size of a physical QCar 2) to simulate interactions with people, other QCars, traffic signs, cones and traffic lights in real size.
Virtual QCar 2 running the Vehicle Control lab. (Video at 1.33x speed)
Virtual QDrone 2
We just released our virtual QDrone 2, removing not only crash risks but also battery limitations! The entire environment including the drone and custom objects can be reset any time, saving precious setup and repair time. You can also test swarm configurations, complex navigation algorithms, and multi-drone interactions in a completely safe environment without the need for a physical replica. Let’s see a video of a swarm of virtual QDrone 2s!
Virtual QDrone 2 running a swarm example. (Video at 1.33x speed)
Getting Started with Multiple Virtual Robots
If you have QLabs and wonder how to get started with multiple robots, we have recently released a virtual multiagent library. This library handles both spawning the robots in your space and starting the necessary real-time files in the background to control the robots. Most of the videos in this blog were created using this library, and the corresponding examples have also been released! Imagine how your research could evolve if you could bring all these robots together in one space. Check out this YOUser webinar presented by Prof. Jan-Christian Kuhr from Stralsund University of Applied Sciences, Germany for a user case of QLabs!
What are you interested in accomplishing with this? Share your thoughts or any questions if you have any, feel free to connect with me on LinkedIn!