
My colleague Filip Vranes recently updated the firmware for the end-effector data acquisition device (DAQ) that I designed for Quanser’s QArm. With this latest firmware release, users can now take full advantage of the end-effector’s functionality, giving users access to plenty of digital and analog I/O. So we’re excited to share some ideas for customizing your QArm for student projects and research applications!

The DAQ
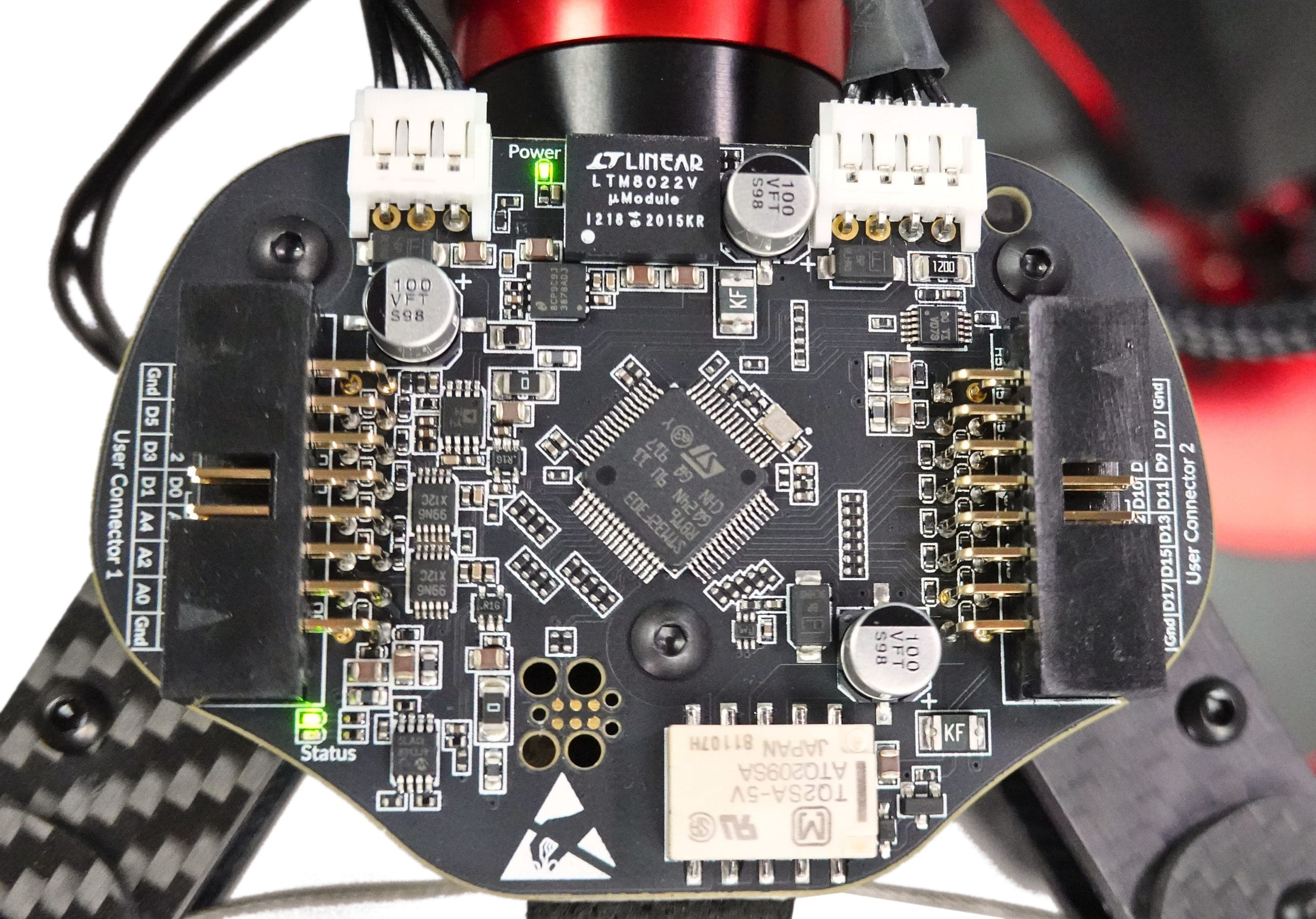
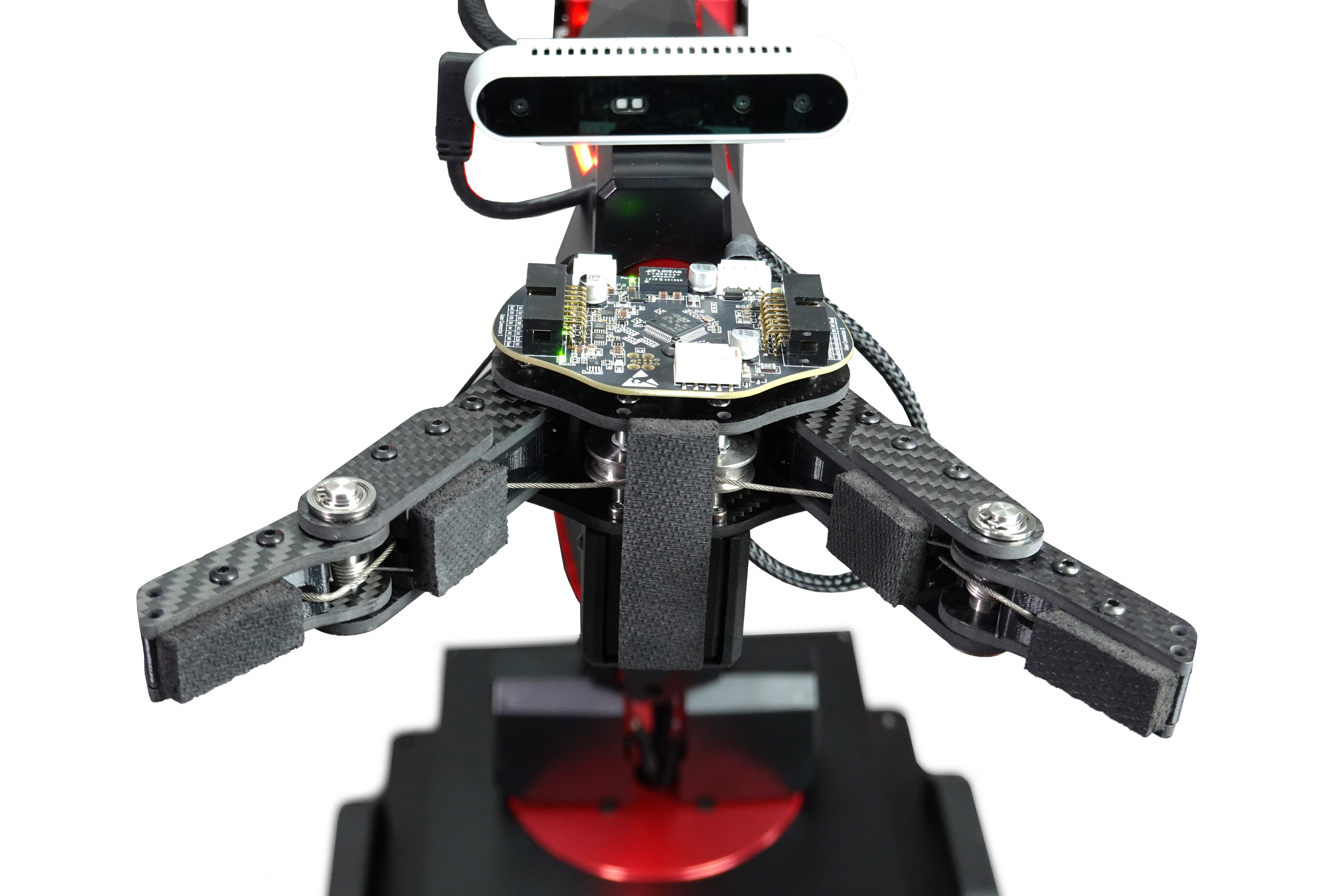
The end-effector DAQ is located next to the gripper. It is used to communicate with the gripper motor, and it also provides opportunities for expansion. There are two 16-pin connectors on the breakout board that allow you to connect your own sensors and actuators.
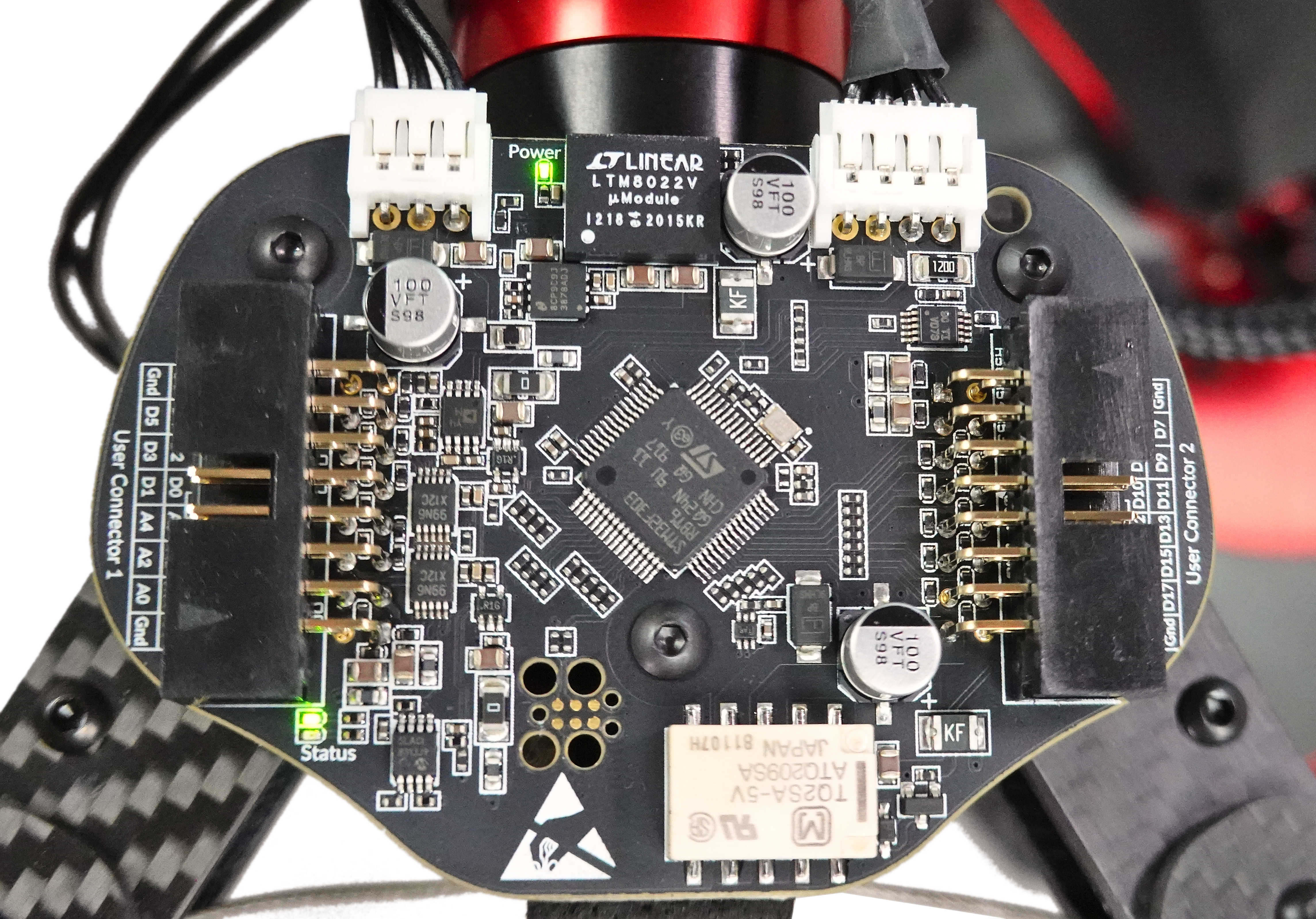
Three power supplies can be accessed from the user connectors:
- +3.3 V, 500 mA
- +5 V, 600 mA
- +12 V, 1.5 A
A relay on the DAQ allows you to toggle the 12 V power supply on and off. By default, this supply is disabled to prevent accidentally shorting 12 V to other pins. The ability to switch the 12 V supply on and off can be used to control a variety of devices. For example, you could connect a solenoid valve at the end-effector. Move the QArm into position, then toggle the 12 V supply to activate the solenoid plunger and accurately dispense paint or adhesive.
Analog Inputs Anyone?
The end-effector DAQ has five analog inputs. You can measure analog signals ranging from 0 V to 5 V with 12-bit accuracy. We think it would be handy to attach force-sensing resistors (like the one shown below) to the five inner foam surfaces of the QArm gripper. Force-sensing resistors change their resistance when pressure is applied. You could ensure the pressure points are balanced, or you could regulate how much force is applied to a delicate object.

Got Digital GPIO? Yes, Plenty of Them!
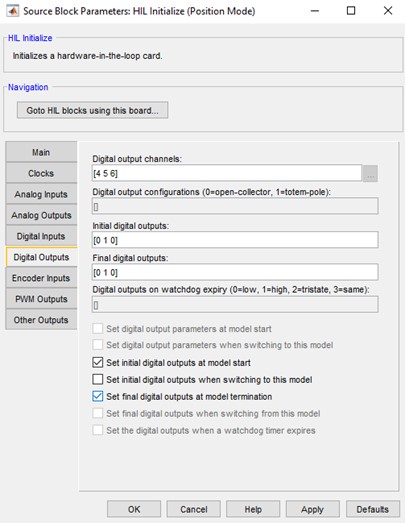
There are 18 general-purpose digital I/O pins on the DAQ. These pins operate at 3.3 V, and they are all 5 V tolerant. Some of the GPIO pins can be configured for alternate functions. If an alternate function is not required, these pins can easily be configured in MATLAB® Simulink® using QUARC™ for general-purpose use. Here we’re configuring channels 4, 5, and 6 as digital outputs:
Among the possible alternate functions, there are three PWM outputs on the DAQ. One common use for PWM is controlling a hobby servo motor (similar to the one shown below). You can power a small servo directly from the breakout board 5 V supply, and connect the servo control pin to one of the PWM outputs. The PWM output can generate the pulses required to control the position of the servo motor.

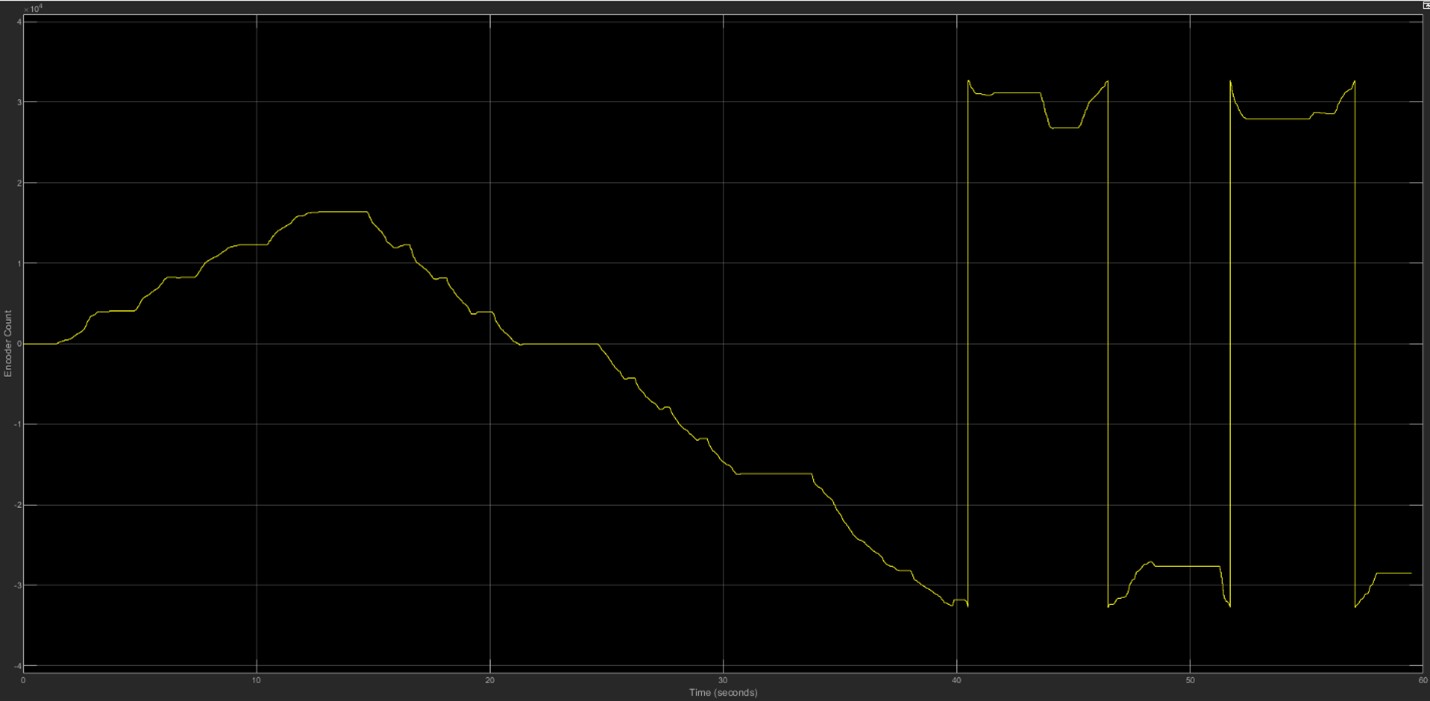
Two of the breakout board input pins can be configured for full quadrature decoding of an encoder. Encoders are used to measure rotation. You can follow the QUARC Encoder Demo to get your encoder set up quickly. In the graph below, we’re rotating a 4096-count encoder clockwise and counter-clockwise until we reach the encoder counter limit and the value wraps. Tip: You can use the QUARC Inverse Modulus Block to automatically unwrap your encoder signals for you!
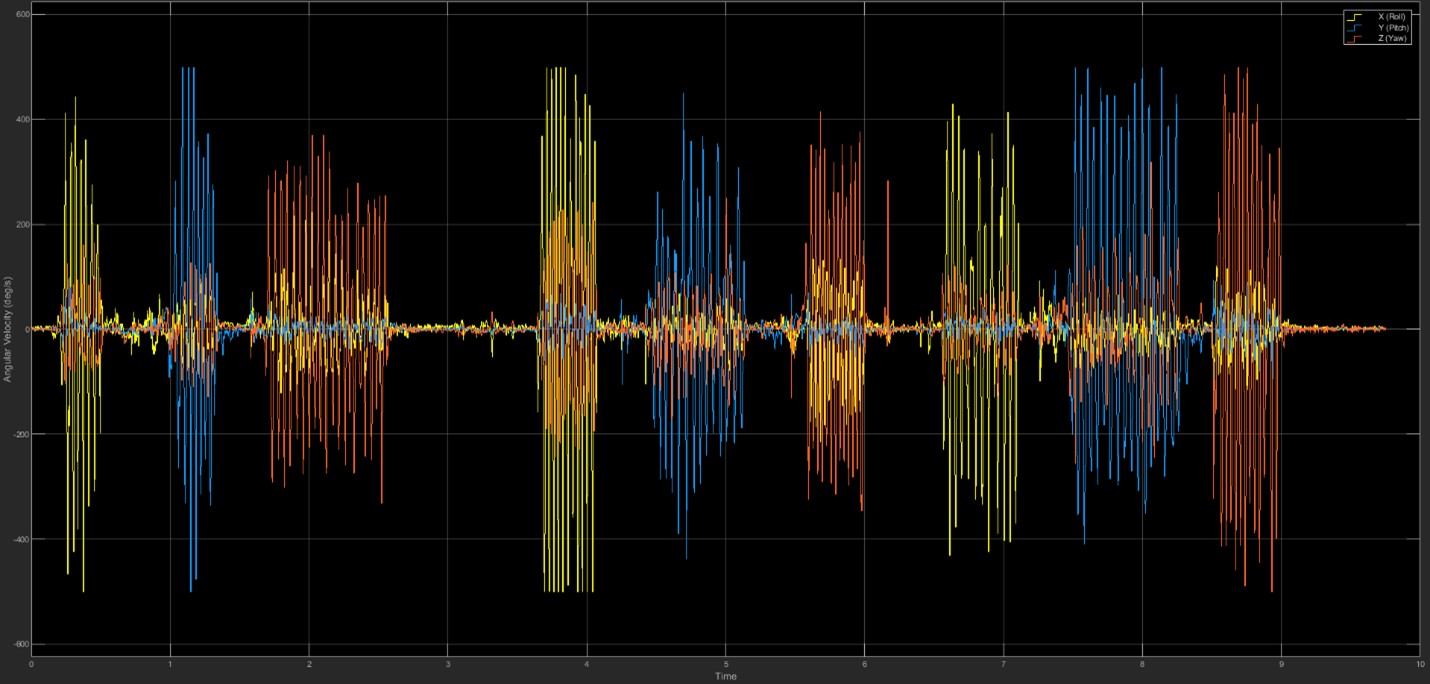
The DAQ also supports I²C, SPI, and UART to communicate with a wide range of devices. For an example explaining how to use the I²C communication, see the QUARC I2C Gyroscope Demo. This example uses a 3-axis digital gyroscope to measure the rate of rotation. We followed the example and connected a PmodGYRO to the breakout board. The graph below shows the angular velocities (roll, pitch, and yaw) from our PmodGYRO.
The QUARC I2C Temperature Sensor Demo is another I²C example. The QArm motors have internal temperature sensors, but you could add your own temperature sensor if you want to measure the temperature of an object being grasped by the QArm gripper.
SPI communication is demonstrated with the QUARC SPI LCD Display Demo. Adding a graphical LCD to the end-effector could allow for creative interactions with people. You could prompt people to place objects within gripping range, or you could display an arrow to indicate the direction the QArm will move next. Imagine giving your QArm a personality with emojis!

Add custom emojis using a graphical LCD display
UART communication is also available with the DAQ. You could use the UART interface to control a barcode scanner module or an RFID card reader. A QArm that can scan and sort items has applications in warehouses and libraries. It could also be used to assist cashiers at retail and grocery stores.
There are many other sensors and actuators that can be connected to the breakout board. Strain gauges, bend sensors, proximity sensors, metal detectors, limit switches, fans, speakers, and laser pointers are a few we’ve thought about.
As you can see, the possibilities are endless. We’d love to hear how you plan to customize your QArm! If you are an existing QArm customer, contact us at tech@quanser.com to upgrade the firmware of your arm.