
In-person Event Details
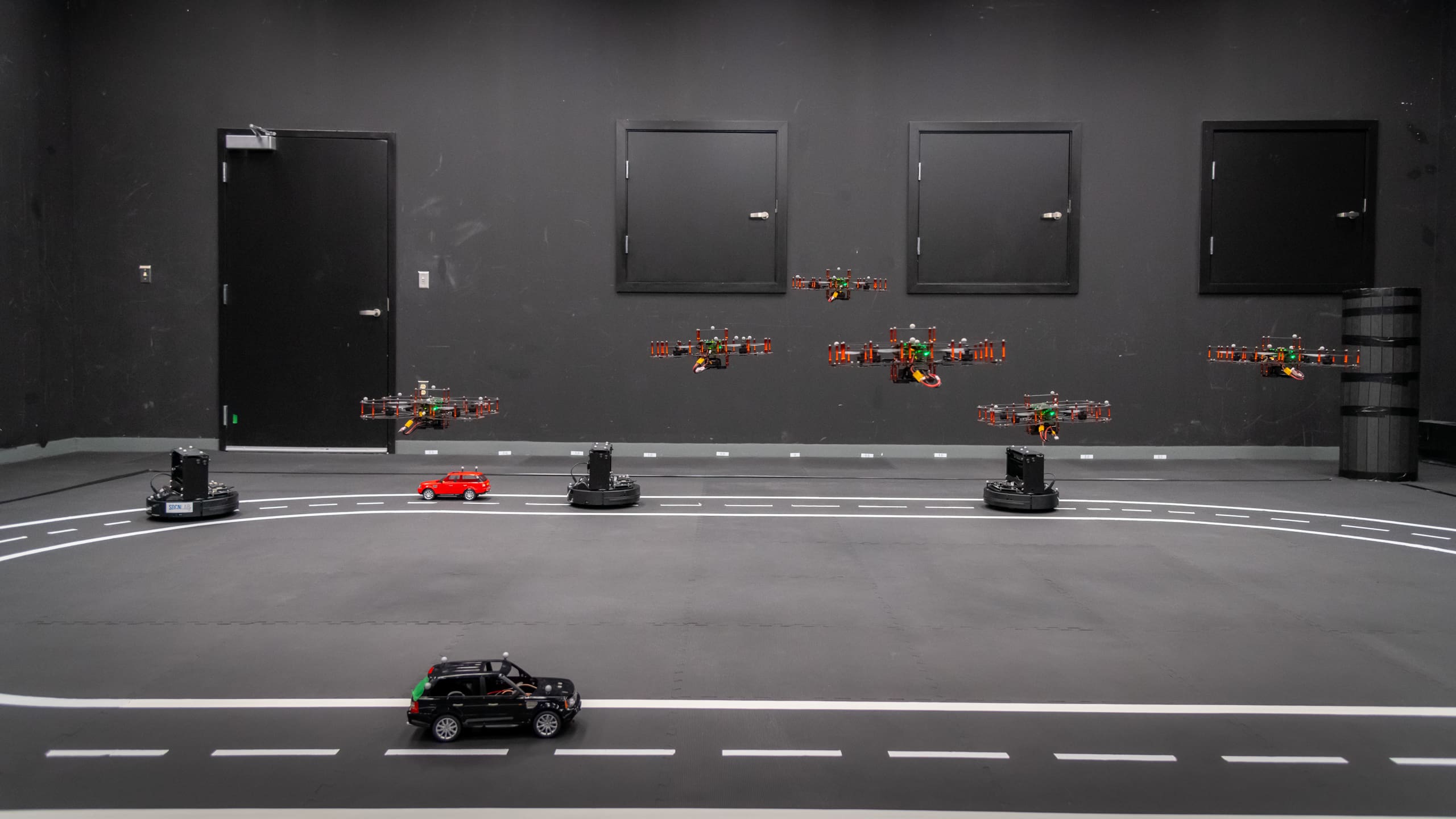
Autonomous Unmanned Systems (AUS) are systems capable of maneuvering in the air, on the ground, above or under the water. There are a number of applications for AUVs in civilian, military, and security areas, such as defence patrol duties, agricultural activities, forest fire monitoring and control, grid monitoring, border control, search, surveillance, and rescue.
In recent decades, academia and industry have paid more attention to, and invested in, the research and development of intelligent autonomous unmanned systems. While the field of autonomous unmanned systems has made tremendous progress, many questions still need to be answered. The increased popularity of data-driven algorithms in both perception systems and planning systems requires a second wave of innovation. In order to transition from systems suitable for demonstration, toward production-ready intelligent autonomous systems in our everyday lives, verifiability, safety, and explainability are key requirements that need to mature. Additionally, autonomous systems that operate in complex, dynamic, and interactive environments require artificial intelligence that can be generalized for unpredictable situations in a timely manner, and can interact with many other agents.
York University and Quanser are jointly organizing this workshop. It aims to provide participants with up-to-date information and the latest technologies involved in developing intelligent autonomous unmanned systems and tackling real industrial problems.
*Please download the workshop flyer if necessary
Here’s the details of the workshop
Date: Monday, July 8, 2024
Time: 9:00 am – 4:00 pm
Host: Dr. Jinjun Shan, Professor of Space Engineering, Departmental Chair, York University
Location: Room 125 – Bergeron Centre for Engineering Excellence
Address: 11 Arboretum Lane Toronto, ON M3J 2S5 Canada
Click “REGISTER NOW” below for the registration!

Presenter’s Bio
Prof. Wen-Hua Chen, Loughborough University, UK
Presentation: Dual control for autonomous unmanned systems: theory and applications
Chen, Wen-Hua | Aeronautical and Automotive Engineering | Loughborough University (lboro.ac.uk)
Prof. Shaoshuai Mou, Purdue University, USA
Presentation: Fundamental Framework for human-autonomy teaming
Shaoshuai Mou – Our People – School of Aeronautics and Astronautics – Purdue University

Prof. Youmin Zhang, Concordia University, Canada
Presentation: Towards Smarter, Safer, More Reliable and More Resilient Cyber-Physical Systems – with Applications to Unmanned Systems and Smart Grids
Prof. Jinjun Shan, York University, Canada
Presentation: Intelligent Decision-Making for Autonomous Driving in Dynamic Interactive Environments

Dr. Ming Hou, DND Canada
Presentation: Interaction-Centered Design for Intelligent Adaptive Systems

Prof. James Elder, York University
Presentation: Toward More Flexible Assistive Robot Technologies
Prof. James Elder, Departments of Electrical Engineering and Computer Science and Psychology

Prof. Hina Tabassum, York University
Presentation: Optimizing Vehicular Networks with Reinforcement Learning Solutions
Assistant Prof. Hina Tabassum, Lassonde School of Engineering

Prof. Didier THEILLIOL, Universite de Lorraine
Presentation: Safe Unmanned Vehicles based on Resilient/Fault Tolerant Control Design with Health Aware Constraint



