
2 DOF Ball Balancer
Introduce vision-based control concepts using the servo family
The 2 DOF Ball Balancer module is a vision-based control experiment designed to teach intermediate to advanced control concepts. You can use it to demonstrate real-world control challenges encountered in vision-based motion platforms, such as pan-tilt cameras.
The 2 DOF Ball Balancer is based on two Rotary Servo Base Units. Using this experiment, students can take what they learned in the one-dimensional Ball and Beam experiment, and apply it to the X-Y planar case.

Product Details
The 2 DOF Ball Balancer module consists of a plate on which a ball can be placed and is free to move. Two Rotary Servo Base Units are connected to the sides of the plate using 2 DOF gimbals. The plate can swivel about in any direction. By controlling the position of the servo load gears, the tilt angle of the plate can be adjusted to balance the ball to a desired planar position.
The digital camera mounted overhead captures two-dimensional images of the plate and track coordinates of the ball in real time. Images are transferred quickly to the PC via a FireWire connection. Students can make the ball track various trajectories (a circle, for example), or even stabilize the ball when it is thrown onto the plate using the controller provided with the experiment.
- Precision-crafted chassis constructed of durable ABS plastic
- Plate mounted on a 2 DOF gimbal, which allows the plates to swivel about both axes
- High-resolution encoders for accurate sensing and positioning of table plate in 2D plane
- High resolution, high quality, fast frame rate CCD digital camera with FireWire connection to allow quick real-time sensing of object position in 2D plane
- Quanser image processing software and Simulink® library provided
| Calibrated base dimensions (L x W) | 41.75 cm x 41.75 cm |
| Table dimensions ( L x W) | 27.5 cm x 27.5 cm |
| Camera support height | 69.5 cm |
| Lever arm length | 9.7 cm |
| Support arm length | 14.6 cm |
| Camera specification | IIDC 1394-based digital camera v 1.31 |
| Camera standard resolution | 640 x 480 |
| Camera frame rate (at full resolution, Y8 format) | 30 FPS |
| Camera pixel format | Y8 in BGR format |
Modeling Topics
- Model derivation
- First-principles derivation
- Transfer function representation
- Linearization
Control Topics
- PID
- Multiple loops
- Sensor analysis
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Two Rotary Servo Base Units
- Quanser VoltPAQ-X2 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Two Rotary Servo Base Units
- Quanser VoltPAQ-X2 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with Quanser Q1-cRIO
- NI myRIO with Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
Related Products

Rotary Servo Base Unit
Foundational modular control experiment

Qube-Servo 2
Versatile teaching platform for controls and mechatronics

Rotary Inverted Pendulum
A classic modeling and control systems experiment
Rotary Flexible Link
Control and vibration analysis of flexible links

Rotary Flexible Joint
Modeling flexible joints in robotic arms

Rotary Double Inverted Pendulum
Take the classic inverted pendulum challenge to the next level

Gyro/Stable Platform
Introduce rotational dynamics concepts

Multi-DOF Torsion
Multi-dimensional system for torsional dynamics
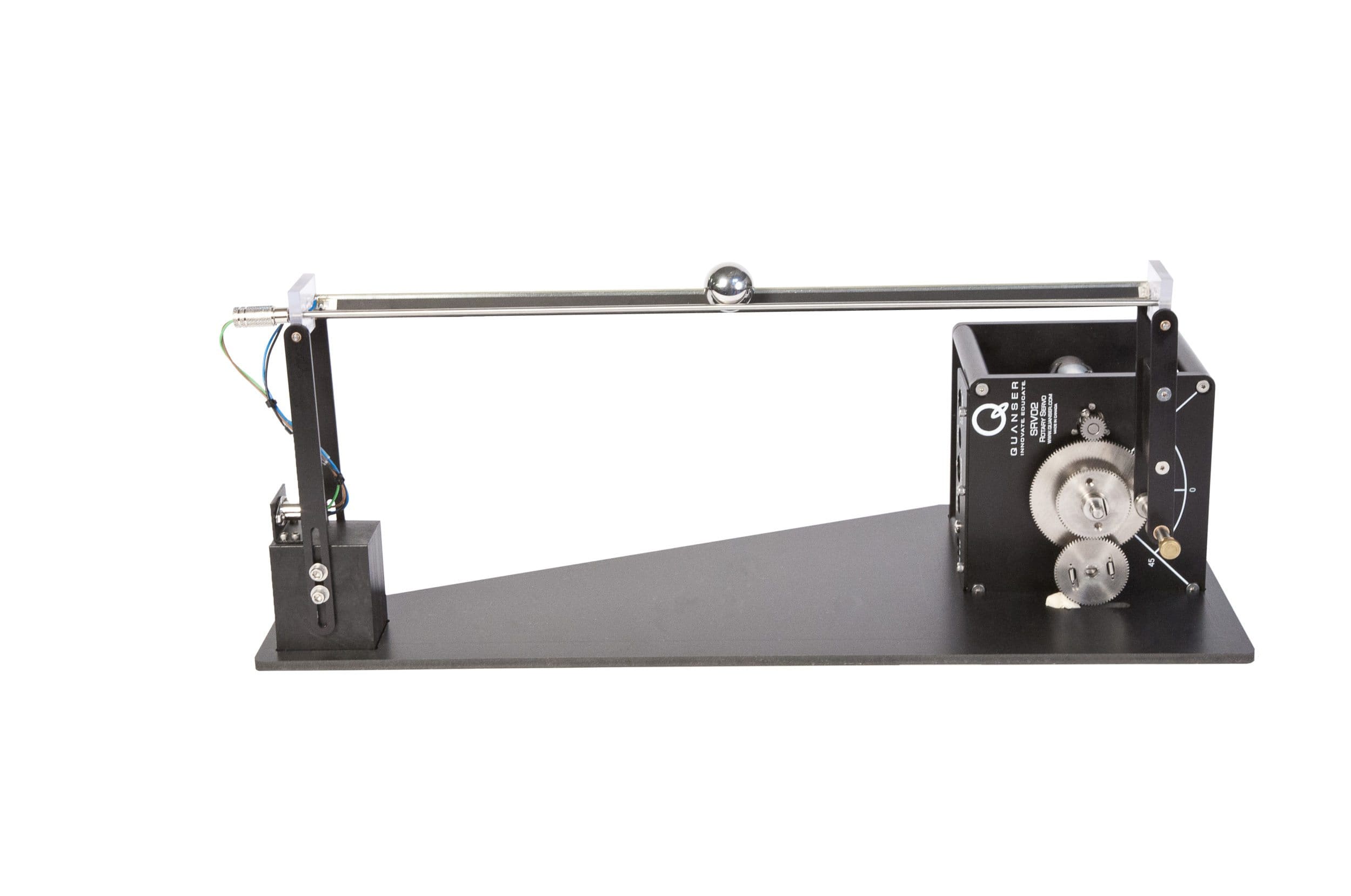
Ball and Beam
Introduce unstable closed loop system control concepts

2 DOF Robot
Introduce fundamental principles of robotics
