
Autonomous Vehicles Research Studio
Jump-start Your Autonomous Vehicles Research
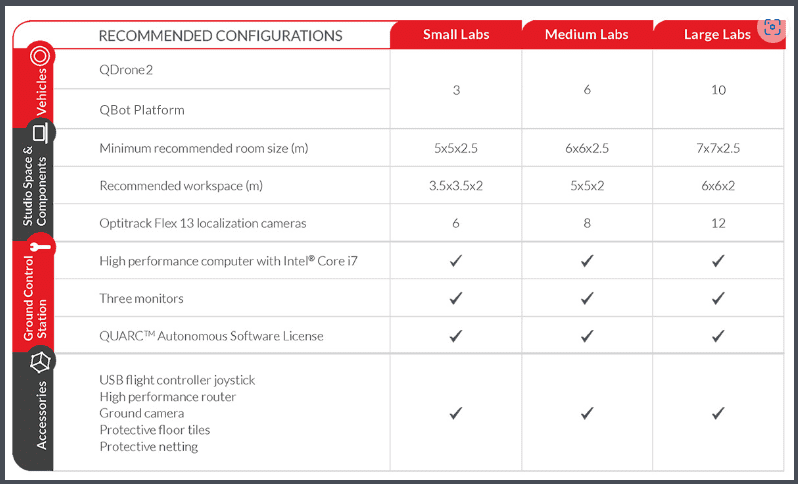
Quanser’s new Autonomous Vehicles Research Studio is the ideal solution for academics looking to build an indoor multi-vehicle research lab in a short amount of time. Consisting of QDrone quadrotors and QBot Platform ground vehicles, ground control station, vision, and safety equipment, the Autonomous Vehicles Research Studio is the only option for research groups looking to jumpstart autonomous robotics research programs and be productive in a very short amount of time.

Product Details
At the center of the research studio are two autonomous vehicles for air and ground: the QDrone 2 and QBot Platform. The successor of the QBall 2, the QDrone 2 is a quadrotor air vehicle equipped with powerful on-board NVIDIA Jetson Xavier NX SOM, multiple high-resolution cameras and integrated sensors. On the ground, the QBot Platform is an innovative open-architecture autonomous ground robot, equipped with a wide range of built-in sensors and a vision system. Working individually or in a swarm, these are the ideal vehicles for your research applications.
QDrone 2
Visit the QDrone 2 product page for more details.
| Dimensions | 50 x 50 x 15 cm |
| Weight (with batteries) | ~1500 g |
| Max Payload | ~300 g |
| Power | 4S 14.8V LiPo (3700mAh) with XT60 connector |
| Flight time | 7-8 minutes for hover per battery charge |
| Onboard Computer | NVIDIA Jetson Xavier NX SOM (powered by a 6-Core NVIDIA Carmel ARM v8.2 64-Bit processor) |
| 384-core NVIDIA Volta GPU with 48 Tensor Cores | |
| 8 GB 128-bit LPDDR4x RAM | |
| Expandable I/O | PWM (2x) |
| UART (2x) | |
| SPI (2x SS pins ) | |
| I² (2x) | |
| ADC (1x) | |
| Encoder input (2x) | |
| CPU GPIO (6x) | |
| Intel® RealSense™ ((D435) | Depth sensing: (3 metre range) |
| RGB (1920X1080) @ 30 FPS) | |
| Omnivision OV9281 | Grayscale (1280×800 @ 120 FPS or 640×480 @ 180 FPS) |
| Sony IMX219 | 3x RGB CSI 160 deg FOV wide angle lenses Cameras providing side and back view |
| 21 FPS to 120 FPS | |
| On board sensors | 2x 6-DOF IMU (gyroscope and accelerometer), 1x Optical Flow sensor, 1x ToF height sensor |
| Connectivity | WiFi 802.11a/b/g/n/ac 867Mbps with dual antennas 1x Micro HDMI port for external monitor support |
| Supported Software and APIs |
|
QBot Platform
Visit the QBot Platform product page for more details.
| Platform | 2-wheel differential drive base with 4 support castors |
| Diameter | 570 mm |
| Height | 227 mm |
| Drivetrain sensing | Current sensing, optical encoders, and digital tachometer per wheel |
| Maximum motion | 1.5 m/s speed and 1 m/s/s acceleration |
| Nominal motion | 0.7 m/s speed and 0.5 m/s/s acceleration |
| Maximum payload @ maximum motion | 20 kg |
| Operation time | 2 hours per battery |
| Power | Up to 2x 84Wh LFP batteries w/ external charging |
| On-board computer | NVIDIA Jetson Orin Nano |
| Downward facing camera | Grayscale w/ global shutter – 640×400 @ 120Hz |
| Front facing camera | Intel RealSense D435 RGB-D camera |
| LiDAR | 2D 360° lidar w/ 16,800 points per second |
| IMU | 6-axis IMU w/ accelerometer and gyroscope |
| GPIO | 40-pin header including SPI / I2C / UART / PWM |
| LEDs | User programmable LEDs |
| LCD | Character display module |
| Language support | MATLAB / Simulink / Python / ROS 2 |
| USB ports | 4x USB 3.0 user ports |
| HDMI | 1 full HDMI port |
| Connectivity | IEEE 802.11ac Wi-Fi & Gigabit Ethernet port |
| Computer Station | Intel Core i7 processor 32GB DDR4 RAM Nvidia GeForce GTX 1050 Ti, 4GB GDDR5 with support for 3 monitors Two Gigabit Ethernet ports Windows 10 Pro Keyboard and mouse |
| Monitors | 3x 24” LED display – ASUS VE248H |
| Localization System | Motion Capture System – Natural Point OptiTrack Flex 13 (6x) with camera mounts provided and Motive software (Motive 1.10.3 Final) |
| WiFi Router | High-Performance Gigabit Wireless Router – NetGear NightHawk AC1900 (R7000) |
| Handset Controller | Spektrum Radio SPMR1000 with USB dongle (SPM1000WS) |
| Protective Netting | 10’ tall netting x 17’ length (default configuration) |
| Floor Mats | 2’ x 2’ industrial foam mats (50x – default configuration) |
| Battery Charger | Balancing charger (2x – One charger per QDrone) – G. T. Power A6 LiPo Battery Charger |
| Nominal Workspace | 3m x 3m x 2m volume |
Related Case Studies

Related Products

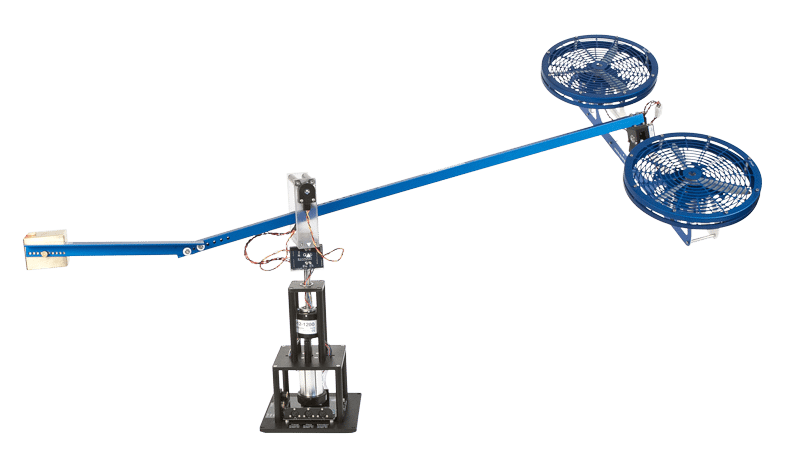
3 DOF Hover
Flight dynamics and control of vertical lift-off vehicles
3 DOF Helicopter
Advanced flight dynamics and aerospace control experiment

Quanser Studios
Accelerate teaching and research in modern academic fields

QDrone 2
Quanser innovation unleashed in the autonomous vehicle research space
