
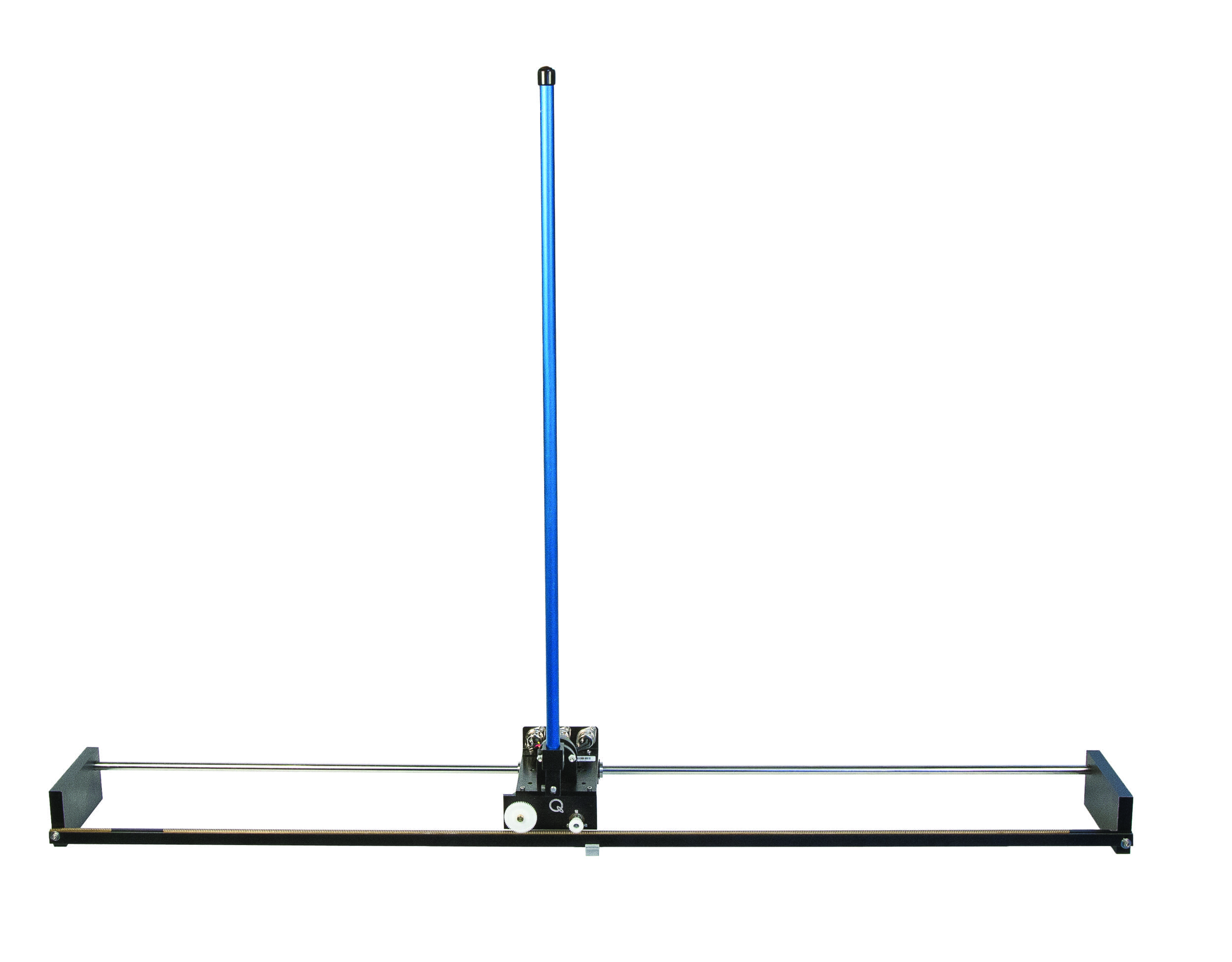
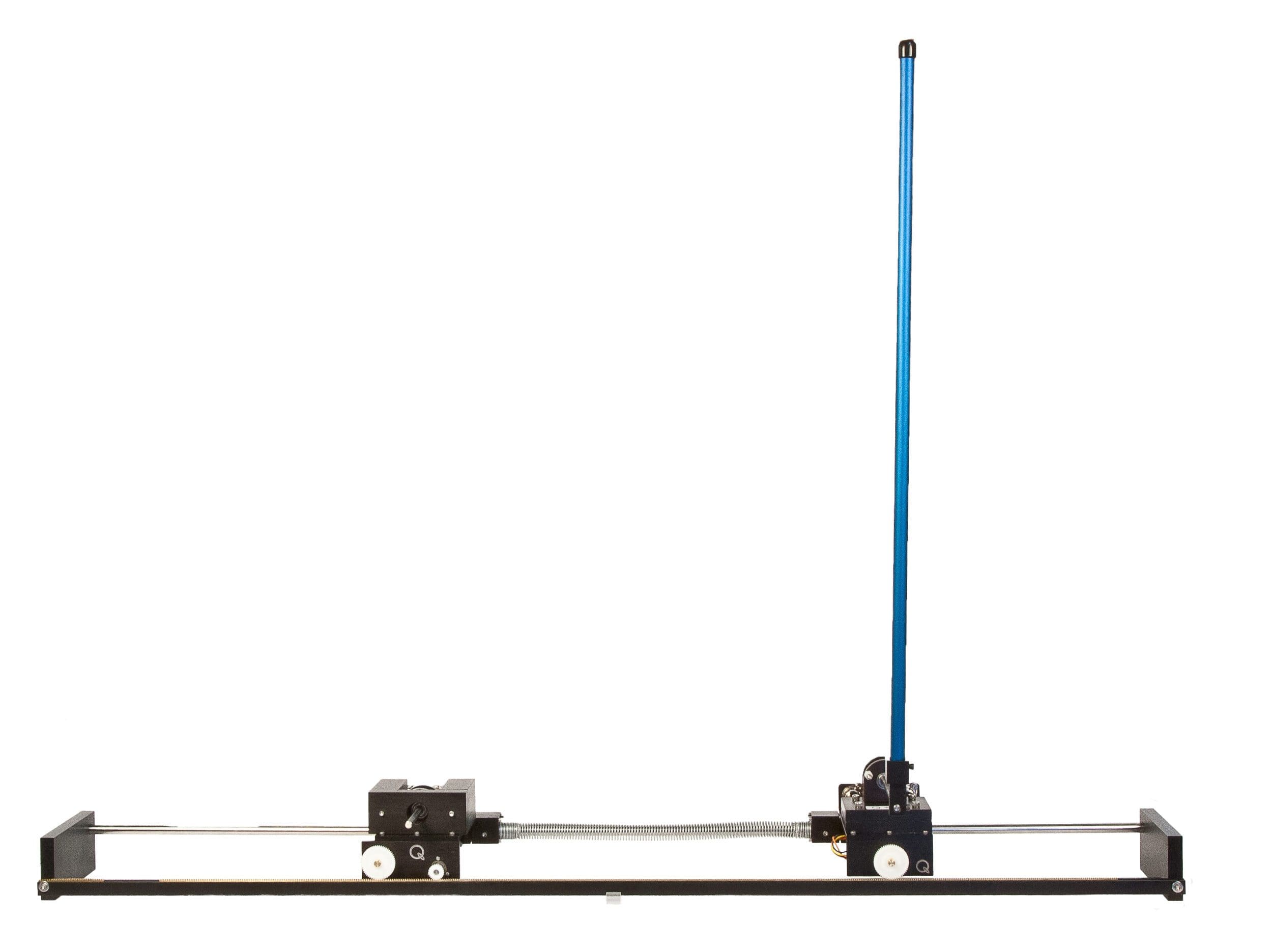
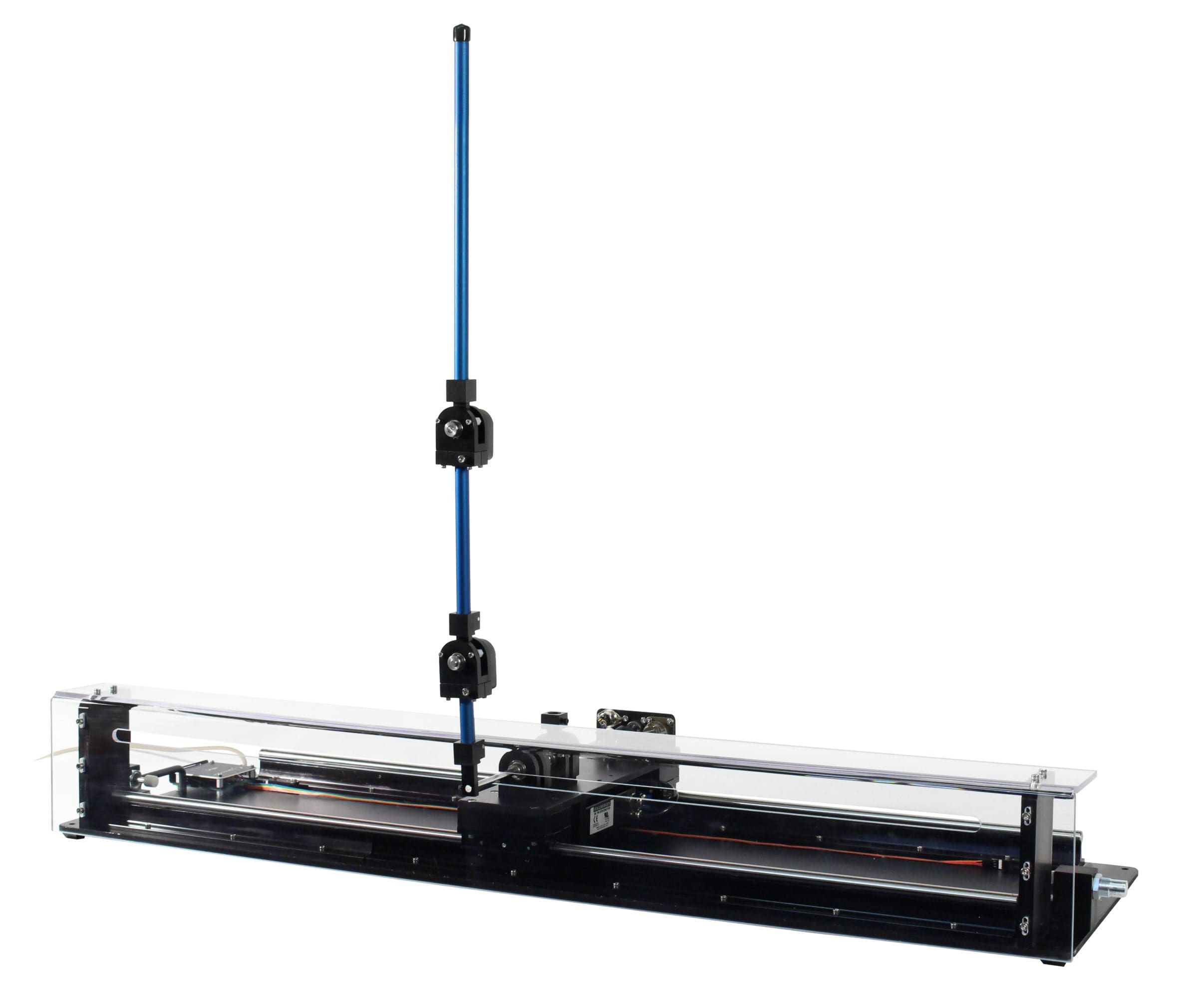
Linear Servo Base Unit with Inverted Pendulum
A modular lab platform for teaching robotics, mechatronics, and controls
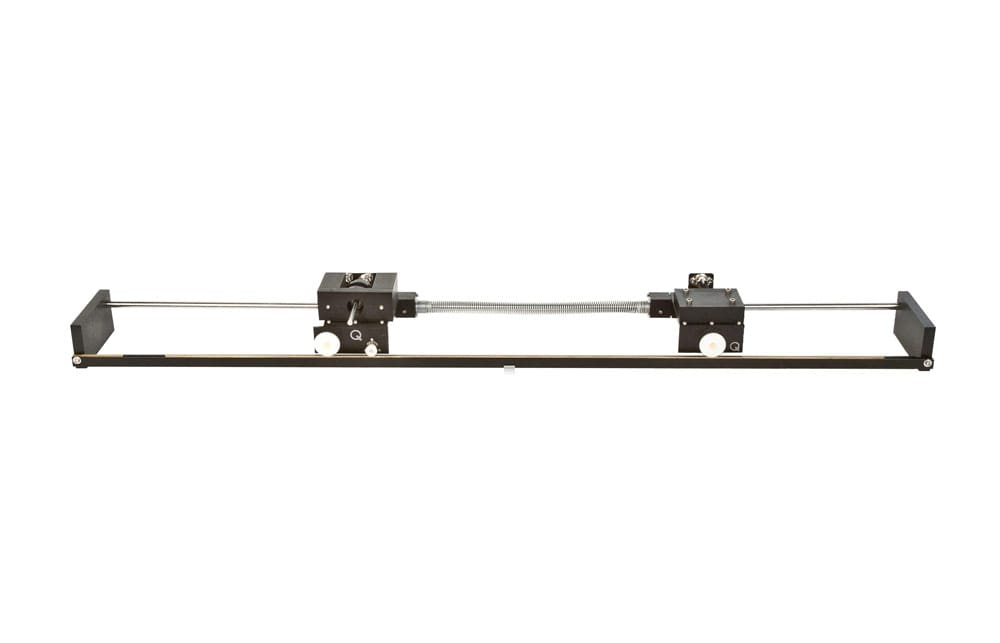
The Linear Servo Base Unit is the fundamental unit for the Quanser linear motion platform. It is ideally suited to introduce basic control concepts and theories on an easy-to-use and intuitive platform.
Use it on its own to perform several experiments, or expand the scope of this unit by adding on other modules to teach an even wider range of experiments. The scalability of the platform gives you an opportunity to expose students to a variety of linear control challenges for a minimal investment.
Gallery



Product Details
The Linear Motion Control Lab is one of the most popular, flexible and modular solutions for teaching controls. Based on the world’s leading turn-key platform for controls education, it is designed to help engineering educators reach a new level of efficiency and effectiveness in teaching controls.
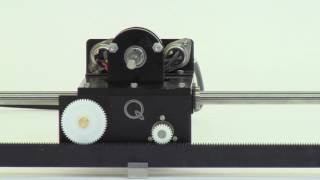
- High quality DC motor and gearbox
- High resolution optical encoders to sense position of the cart and pendulum angels
- Two pendulum sizes supplied: medium and long
- Seven add-on modules to expand the use of the base unit (modules can be purchased separately)
- Easy-connect cables and connectors
- High quality aluminum chassis with precision-crafted parts
- Fully compatible with MATLAB®/Simulink® and LabVIEW™
| Rack dimensions (L x W x H) | 102 cm x 15 cm x 6.1 cm |
| Cart travel | 81.4 cm |
| Pendulum workspace (L x W x H) | 219 cm x 30 cm x 127 cm (56 cm below the desk surface) |
| Cart mass | 0.38 kg |
| Cart weight mass | 0.37 kg |
| Motor nominal input voltage | 6 V |
| Motor maximum continuous current (recommended) | 1 A |
| Motor maximum speed (recommended) | 6000 RPM |
| Planetary gear box ratio | 3.71 |
| Cart encoder resolution (in quadrature) | 4096 counts/rev |
| Medium pendulum mass (with T-fitting) | 0.127 kg |
| Medium pendulum length (pivot to tip) | 33.65 cm |
| Long pendulum mass | 0.230 kg |
| Long pendulum length (pivot to tip) | 64.13 cm |
| Pendulum encoder resolution (in quadrature) | 4096 count/rev |
Modeling Topics
- Derivation of dynamic model from first-principles
- Transfer function representation
- Model validation
- Derivation of dynamic model using Lagrange
- State-space representation
- Linearization
Control Topics
- PID
- Lead Compensator design
- Linear-quadratic regulator (LQR)
- Hybrid control
- Pole placement
- Energy-based/non-linear control
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with Quanser Q1-cRIO
- NI myRIO with Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
Related Case Studies
Related Products

Linear Double Inverted Pendulum
Take the classic linear control problem to the next level

Linear Flexible Inverted Pendulum
Linear Flexible Joint
Teach the fundamentals of dynamics and control
Linear Flexible Joint with Inverted Pendulum
High Fidelity Linear Cart System
This product is no longer available.
