Multi-DOF Torsion
Multi-dimensional system for torsional dynamics
The Rotary Multi-DOF Torsion Module is ideal to teach principles of robotics and torsional dynamics. You can use it to demonstrate real-world control challenges, such as the effect of flexible coupling between an actuator and a load encountered in complex industrial processes.
The Torsion module attaches to the Rotary Servo Base Unit for teaching 1 DOF torsional dynamics. Adding one to seven torsion modules in series allows expanding complexity of the experiments to study multi-DOF torsional dynamics.

Gallery


Product Details
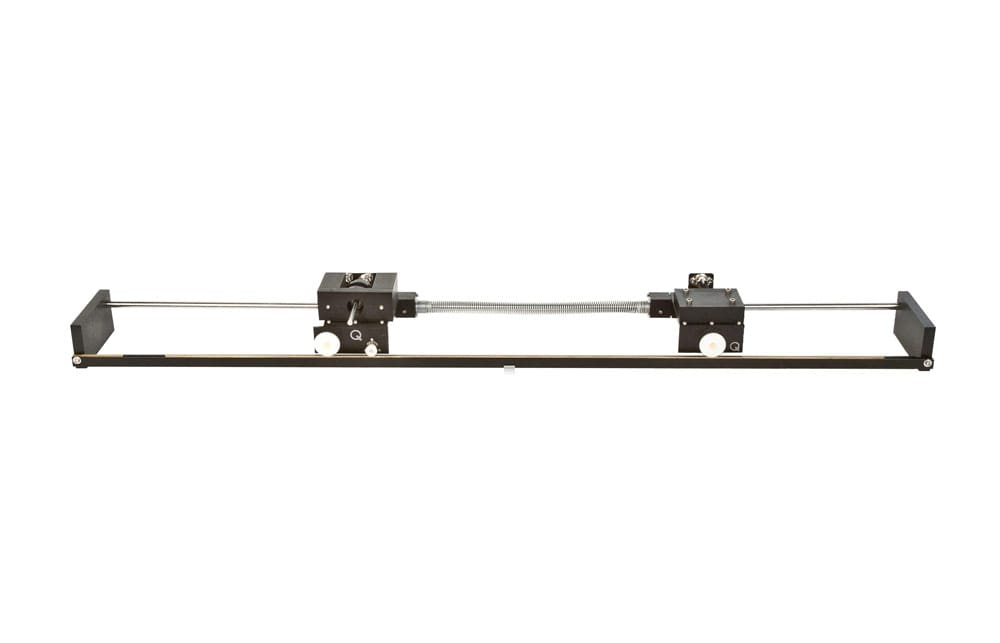
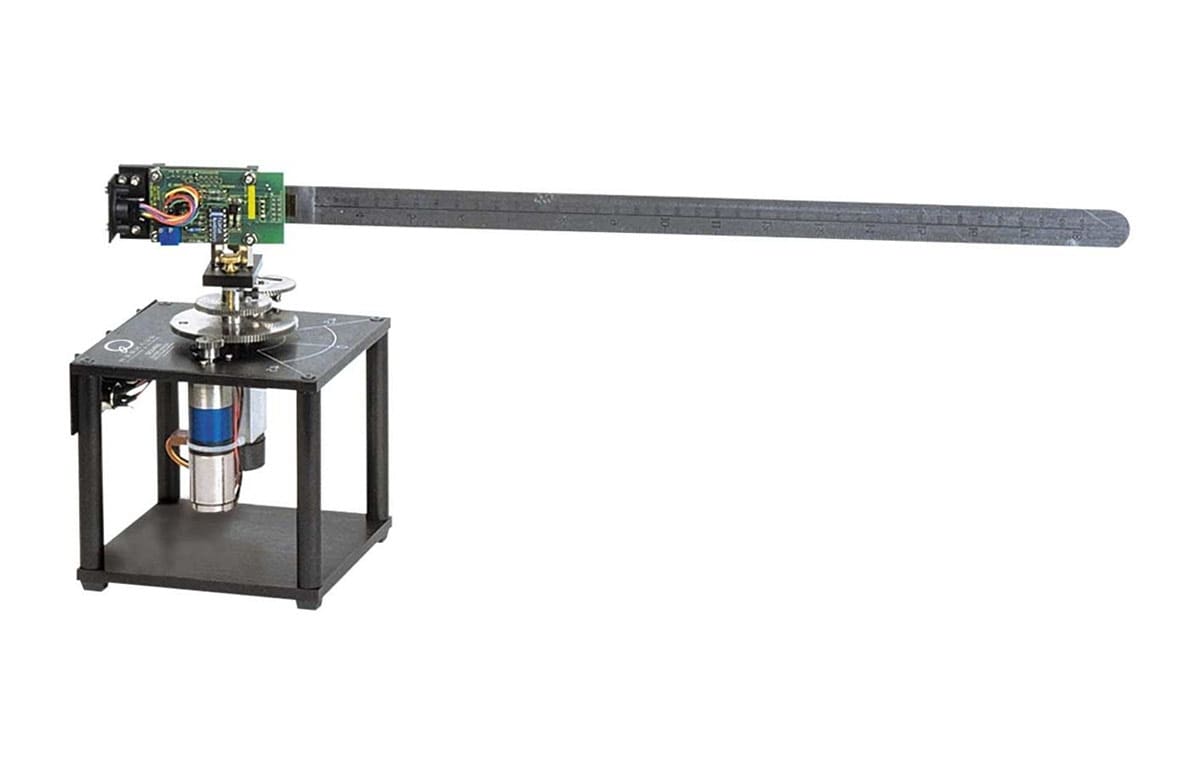
The Torsion Module is a rotary torsional system that consists of an instrumented bearing block, which is mounted in a cubic aluminum frame. A shaft is free to spin inside the bearing block and its angle is measured using an encoder. The shaft can be fitted with either a torsional load or a flexible coupling.
The assembly made of one Rotary Torsion module coupled to a Rotary Servo Base Unit constitutes one Degree of Freedom (1 DOF) torsional system. The Rotary Servo Base Unit lies on its side so that its DC motor and output shaft are horizontal and able to rotate a flexible coupling attached to a rotational load. The torsional load consists of two inertial disc masses, which can be located at different anchor points along their support bar. Up to seven torsion modules can be coupled in cascade to allow for multi-dimensional control problems.
- High resolution encoders to sense the torsion shaft angle
- Variable disc position to achieve different inertia
- Torsion module easily attaches to the Rotary Servo Base Unit
- Can mount multiple torsion modules for multi degree of freedom torsion system
| Overall module dimensions (L x W x H) | 21 cm x 13 cm x 13 cm |
| Total module mass | 1.2 kg |
| Disk weight mass | 0.0022 kg |
| Disk weight diameter | 3.80 cm |
| Flexible coupling stiffness | 1.0 N.m/rad |
| Load support bar length | 4.4 cm |
| Load support bar mass | 0.21 kg |
Modeling Topics
- First-principles derivation (1 DOF Torsion)
- Lagrange derivation (2 DOF Torsion)
- State-space representation (1 & 2 DOF Torsion)
- Model validation (1 & 2 DOF Torsion)
- Parameter estimation (1 & 2 DOF Torsion)
Control Topics
- Linear-quadratic regulator
- Vibration control
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Rotary Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Rotary Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with Quanser Q1-cRIO
- NI myRIO with Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
Related Products
Rotary Flexible Link
Control and vibration analysis of flexible links

Rotary Flexible Joint
Modeling flexible joints in robotic arms
Active Suspension
Advanced platform mass-spring-damper modelling and control