
Back to Products
QLabs Virtual QArm
Virtual platform for distance and blended undergraduate robotics courses
Robotics & Mechatronics
Manipulator Robotics
Software
Virtual Experiments
QLabs Virtual QArm is a fully instrumented, dynamically accurate virtual twin of a Quanser QArm system. It behaves in the same way as the physical hardware and can be measured and controlled using MATLAB®/Simulink® and other development environments. QLabs Virtual QArm can enrich your lectures and activities in traditiona... more
Product Details
Same as the physical QArm, the virtual system is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera.
- High-fidelity, credible lab experiences equivalent to use of physical lab equipment
- 12-month, multi-seat subscription
- Full access to system parameters through MATLAB®/Simulink®
- Comprehensive curriculum mapped to popular robotics textbooks
| QArm virtual sensors | Joint position Joint velocity Joint PWM command Joint current RGBD sensor |
| App download & access to subscription management | Quanser Academic Portal |
| App OS Compatibility | Microsoft Windows 10 or later |
| Required software | Curriculum designed for MATLAB and Simulink R2021a or later, with compatibility with Python 3 |
| Minimum system requirements | Video Card: Intel HD 520 or equivalent DX11 GPU Processor: Core i5-6300U series mobile CPU or equivalent Memory: 8 GB RAM |
| Recommended system requirements | Video Card: Intel UHD 620 or equivalent GPU Processor: Core i7-8665U series mobile CPU or equivalent Memory: 16 GB RAM |
- Introduction to QArm sensors and components
- Joint control
- Forward kinematics
- Inverse kinematics
- Path planning
- Differential kinematics (coming soon)
- Statics (coming soon)
- Dynamics (coming soon)
Related Products



Robotics & Mechatronics
Manipulator Robotics
QArm
Modern Manipulator Arm for Robotics Courses and Research
Quanser’s QArm is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera, designed for...
Mobile Robotics
Software
Virtual Experiments
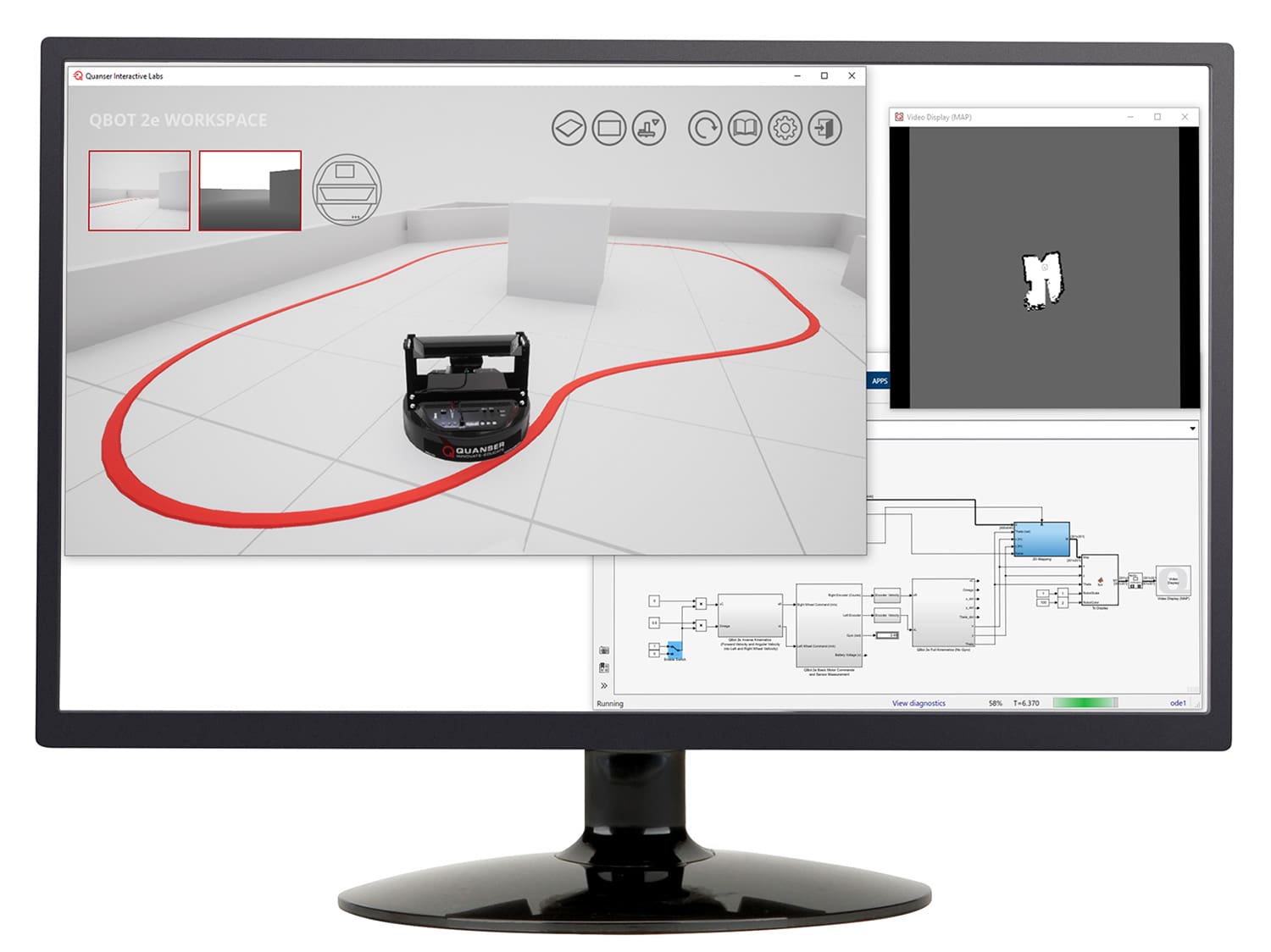
QLabs Virtual QBot 2e
This product is no longer available.
QLabs Virtual QBot 2e is a fully instrumented, dynamically accurate virtual twin of a classic Quanser QBot 2e system. It...

QLabs Robotics
A Feature-rich Mobile and Manipulator Robot for Every Student
QLabs Robotics is a scalable platform capable of delivering credible, academically appropriate, and high-fidelity lab experiences through interactions with virtual...