
QLabs Virtual QCar
High fidelity digital twin in an interactive driving world
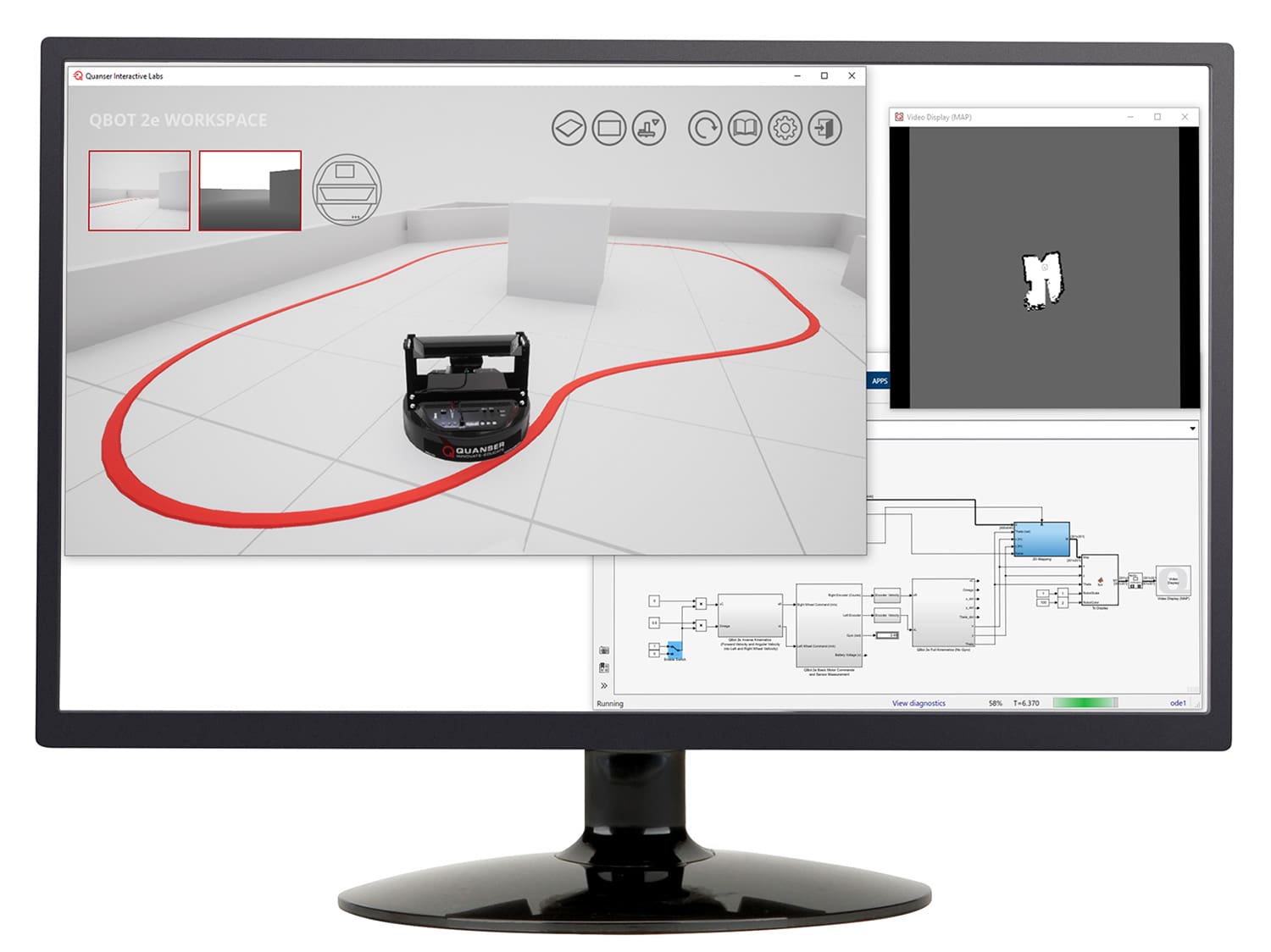
The Quanser Virtual QCar is a fully instrumented, dynamically accurate digital twin of the Quanser QCar system. It behaves the same way as the physical hardware and can be measured and controlled using the Python, ROS, and MATLAB Simulink development environments.
With a reconfigurable and visually rich environment that mirrors the physical Self-Driving Car Studio, i... more

Gallery


Product Details
The Quanser Virtual QCar is a fully instrumented, dynamically accurate digital twin of the Quanser QCar system. It behaves the same way as the physical hardware and can be measured and controlled using the Python, ROS, and MATLAB Simulink development environments.
With a reconfigurable and visually rich environment that mirrors the physical Self-Driving Car Studio, it can enrich your lectures, labs, research, and outreach activities. Beyond the classroom and research lab, the platform offers the capacity to give students skills-based leaning experiences in a blended and/or hybrid configuration for distance and online courses.
- High-fidelity, credible lab experiences equivalent to use of physical QCar
- 12-month multi-seat subscription
- Full access to system parameters through MATLAB®/Simulink® or Python®
- ABET-aligned curriculum mapped to popular control engineering textbooks
| QCar virtual sensors |
4x CSI cameras160° FOV820 x 410 resolution at 30 Hz |
| 1x Intel RealSense RGB-D camera |
640 x 480 resolution at 30 Hz8-bit depth sensing |
| 2D LiDAR |
360°16-bit depth sensing |
| 6 axis IMU |
3-axis accelerometer3-axis gyroscope |
QLabs Virtual QCar runs on Windows 10 or later and requires Curriculum designed for MATLAB and Simulink R2021a or later, with compatibility with Python 3.
- Image acquisition and camera interfacing
- Sensor interfacing and kinematic modeling
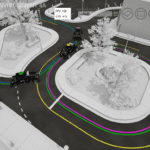
- Line detection and lane keeping
- Occupancy grid mapping
- Sensor fusion
- Object detection and classification
- Lateral and longitudinal control
- Self-driving behavior planning
| QCar virtual sensors |
4x CSI cameras160° FOV820 x 410 resolution at 30 Hz |
| 1x Intel RealSense RGB-D camera |
640 x 480 resolution at 30 Hz8-bit depth sensing |
| 2D LiDAR |
360°16-bit depth sensing |
| 6 axis IMU |
3-axis accelerometer3-axis gyroscope |
QLabs Virtual QCar runs on Windows 10 or later and requires Curriculum designed for MATLAB and Simulink R2021a or later, with compatibility with Python 3.
Environment Lighting Changes Weather
Interactive Actors
Pedestrians, Traffic Cones, QCars, Animals and Cameras
Environment Actors
Cross Walks, Traffic Lights, Signs3D shapes and Coloured splines
Related Products


QCar
THIS PRODUCT IS NO LONGER AVAILABLE.

QDrone 2
Quanser innovation unleashed in the autonomous vehicle research space
