
Back to Products
QNET 2.0 DC Motor Board
This product is no longer available.
The Quanser QNET 2.0 DC Motor board is a versatile servo system designed to teach and demonstrate the fundamentals of DC motor control in a variety of ways. Designed exclusively for NI ELVIS platform and LabVIEW™ software, the system can be easily configured to control motor position and speed, as well as for modeling experiments.
Gallery


Product Details
The Quanser QNET 2.0 DC Motor board is a versatile servo system designed to teach and demonstrate the fundamentals of DC motor control in a variety of ways. The system can be easily configured to control motor position and speed, as well as for modeling experiments.
- Durable DC servo motor with no cogging
- Removable inertia disk
- Built-in PWM amplifier with linear response
- High-resolution optical encoder to sense position
- Hardware velocity measurement
| Motor nominal input voltage | 18.0 V |
| Motor nominal speed | 3050 RPM |
| Motor torque constant | 0.042 Nm/A |
| Motor terminal resistance | 8.4 Ω |
| Rotor inertia of the motor | 4.0 x 10-6 kg.m² |
| Encoder line count | 512 lines/rev |
| Encoder line count in quadrature | 2048 lines/rev |
| Encoder resolution (in quadrature) | 0.176 deg/count |
| Amplifier type | PWM |
| Amplifier peak current | 2.5 A |
| Amplifier continuous current | 0.5 A |
| Amplifier output voltage | ± 24 V with 42% duty cycle limit (± 10 V) |
- System modeling and model validation
- Speed and position control
- System simulation
- PID control
- Error tracking
- Disturbance rejection
The following additional components are required to complete your workstation, and are sold separately:
For LabVIEW
- NI ELVIS II+
Related Products

Electromechanical Control
QUBE – Servo 2
Versatile teaching platform for controls and mechatronics
The Quanser QUBE™-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at...

Control Systems & Dynamics
Electromechanical Control
Rotary Servo Base Unit
Foundational modular control experiment
The Rotary Servo Base Unit is the fundamental element of the Quanser Rotary Control family. It is ideally suited to...

Analog Electronics Labs (for NI ELVIS II+)
Bring Excitement and Relevance to Analog Circuit Design
AELabs take students beyond the breadboard. It gives them hands-on experience with complex analog circuits which could not practically be...
Electromechanical Control
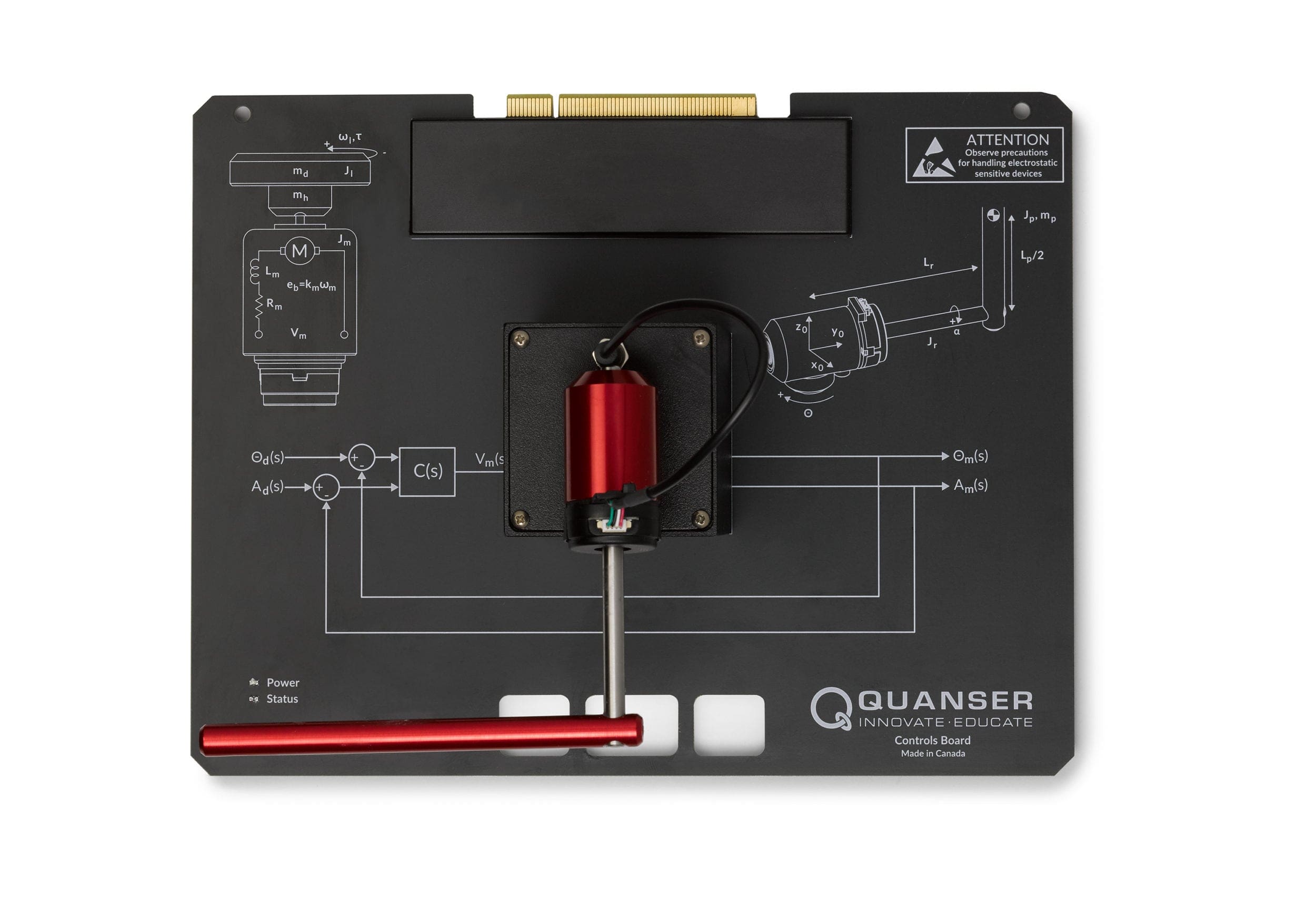
Quanser Controls Board
Investigate introductory and advanced controls
The Quanser Controls Board offers a complete package for studying fundamental and advanced controls topics. The skills and hands-on experiences...
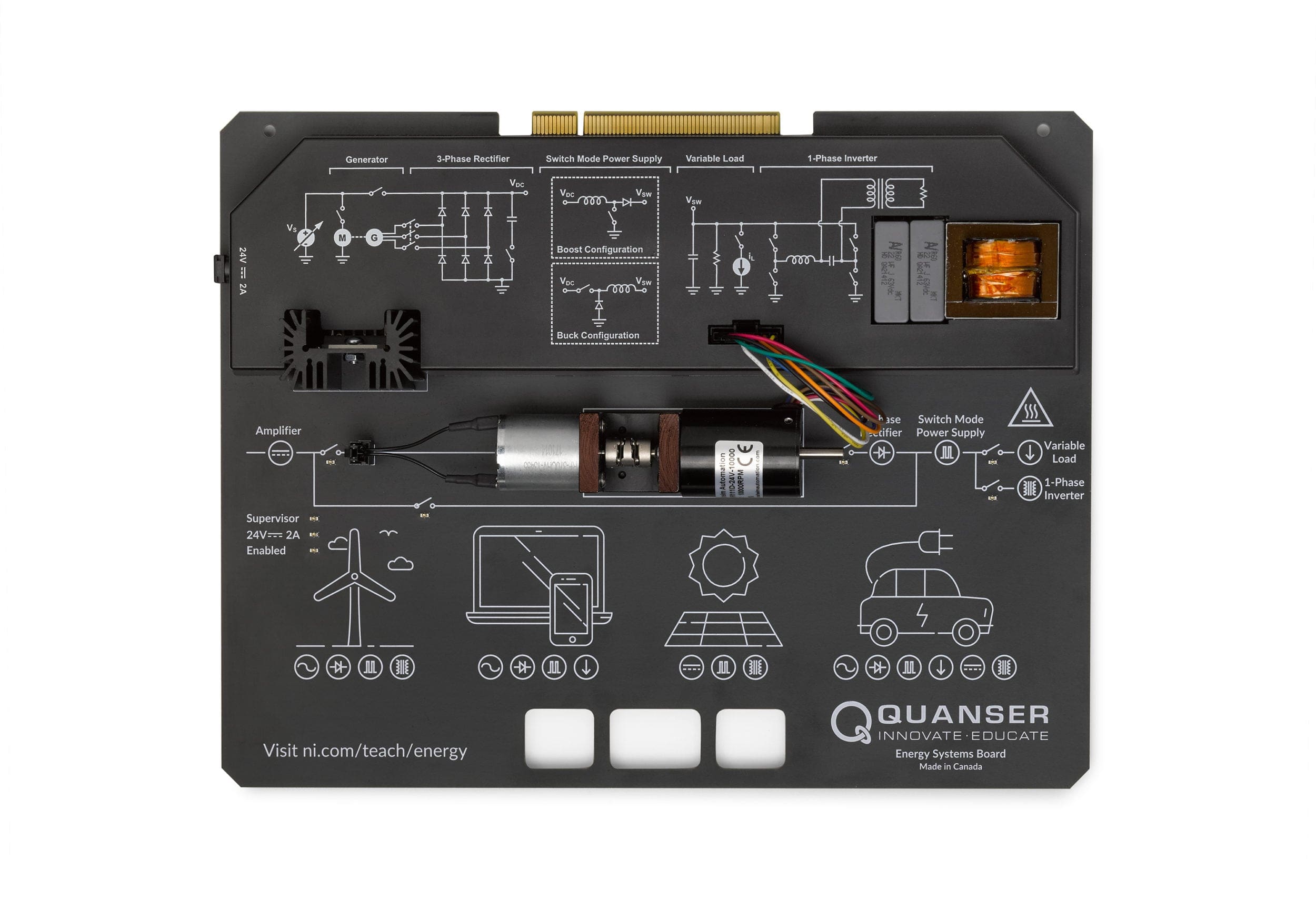
Quanser Energy Systems Board
Prepare students for energy systems engineering applications
The Quanser Energy Systems Board is intended to provide a safe, hands-on introduction to electrical power systems. The board uses...
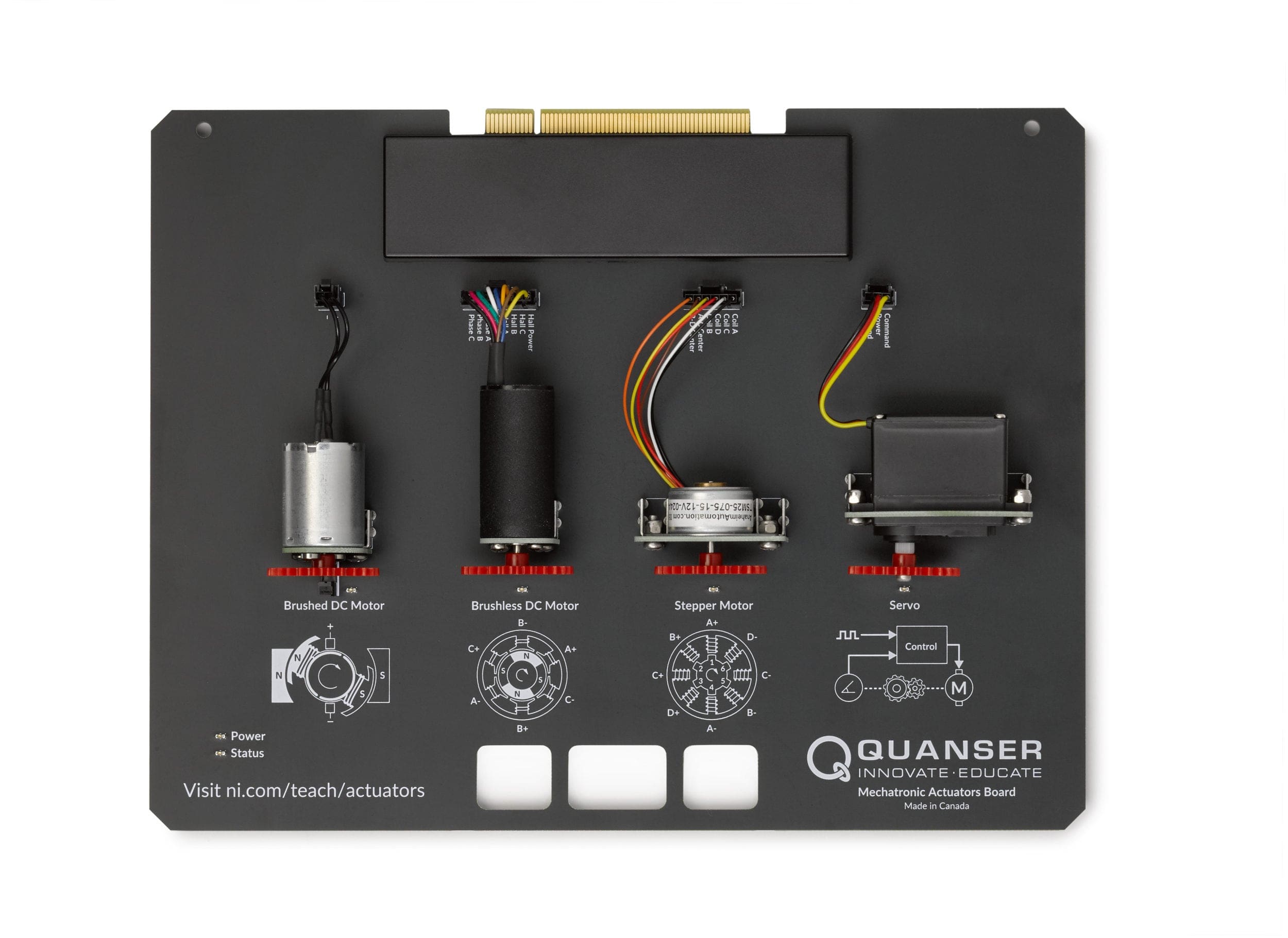
Quanser Mechatronic Actuators Board
Introducing students to actuators and their applications
Understanding the various types of actuators which are available, as well as the differences between them is key to making...

Quanser Mechatronic Sensors Board
Introduce students to sensors and their applications
A critical component of any mechatronics course or program is an understanding of the theory and application of sensors used...
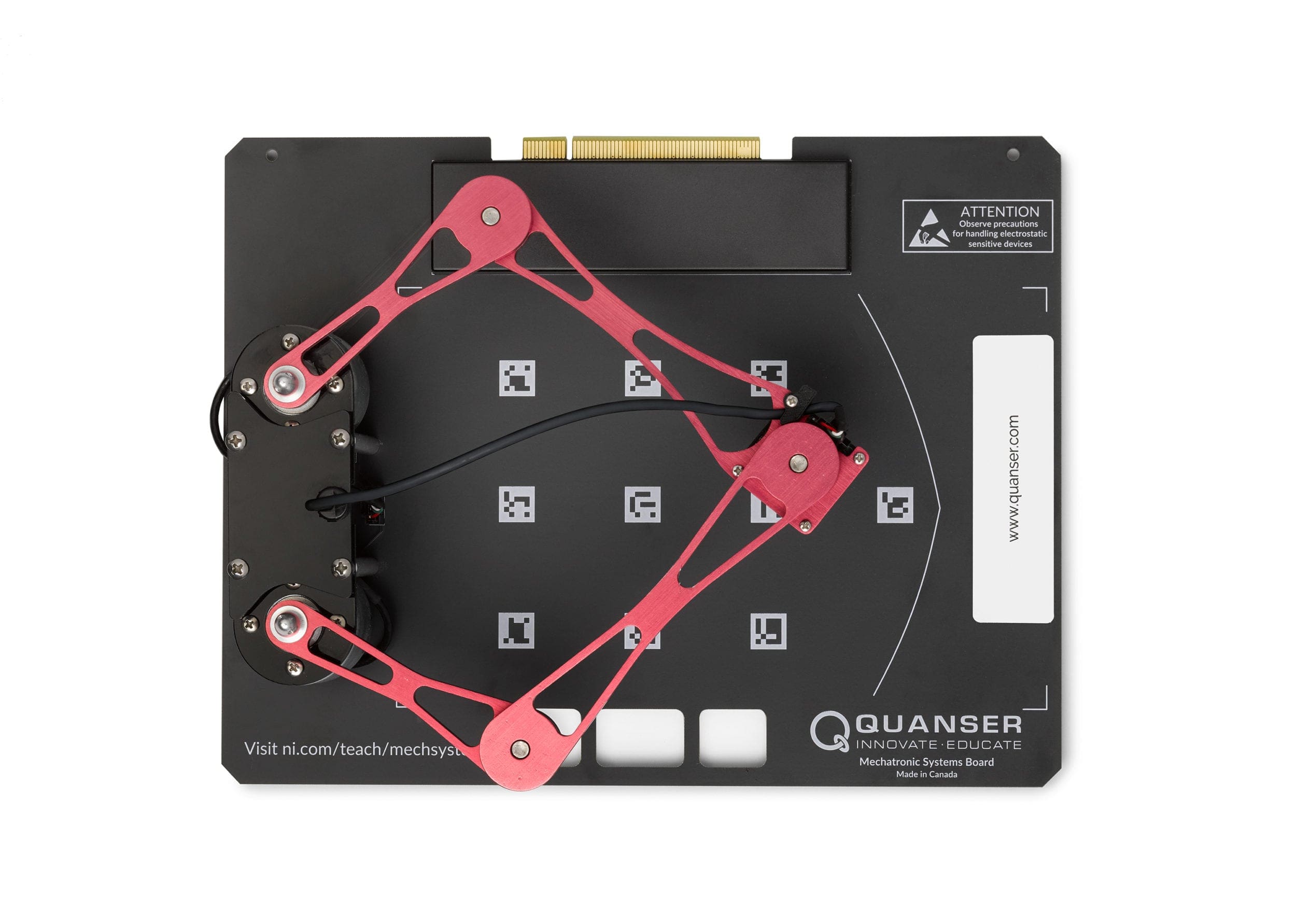
Quanser Mechatronic Systems Board
Prepare students for engineering systems design and integration
The Quanser Mechatronic Systems Board is designed to provide hands-on experience with a complete mechatronic system in a safe, and...