
Self-Driving Car Studio
A multi-disciplinary turnkey laboratory that can accelerate research, diversify teaching, and engage students from recruitment to graduation.
The Quanser Self-Driving Car Studio is the ideal platform to investigate a wide variety of research topics for teaching and academic research in an accessible and relevant way. Use it to jump-start your research or give students authentic hands-on experiences learning about the essentials of self-driving. The studio brings you the tools and components you need to test and validate dataset generation, mapping, navigation, machine learning, and other advanced self-driving concepts at home or on campus.
Check ACC Self-Driving Car Student Competition to get more information on how Quanser and QCar empowering the next generation of engineers.

Gallery






Product Details
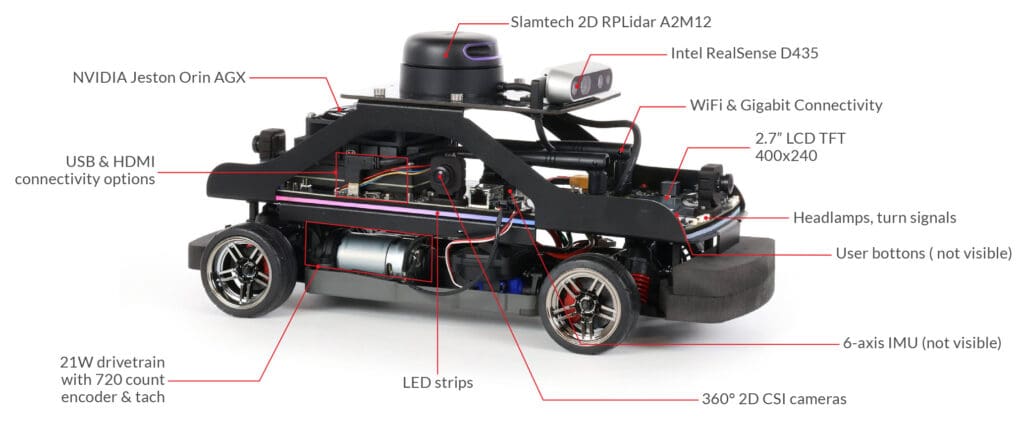
At the center of the Self-Driving Car Research Studio, the QCar 2, is an open-architecture scaled model vehicle, powered with NVIDIA® Jetson™ Orin AGX supercomputer, and equipped with a wide range of sensors, cameras, encoders, and user-expandable IO.
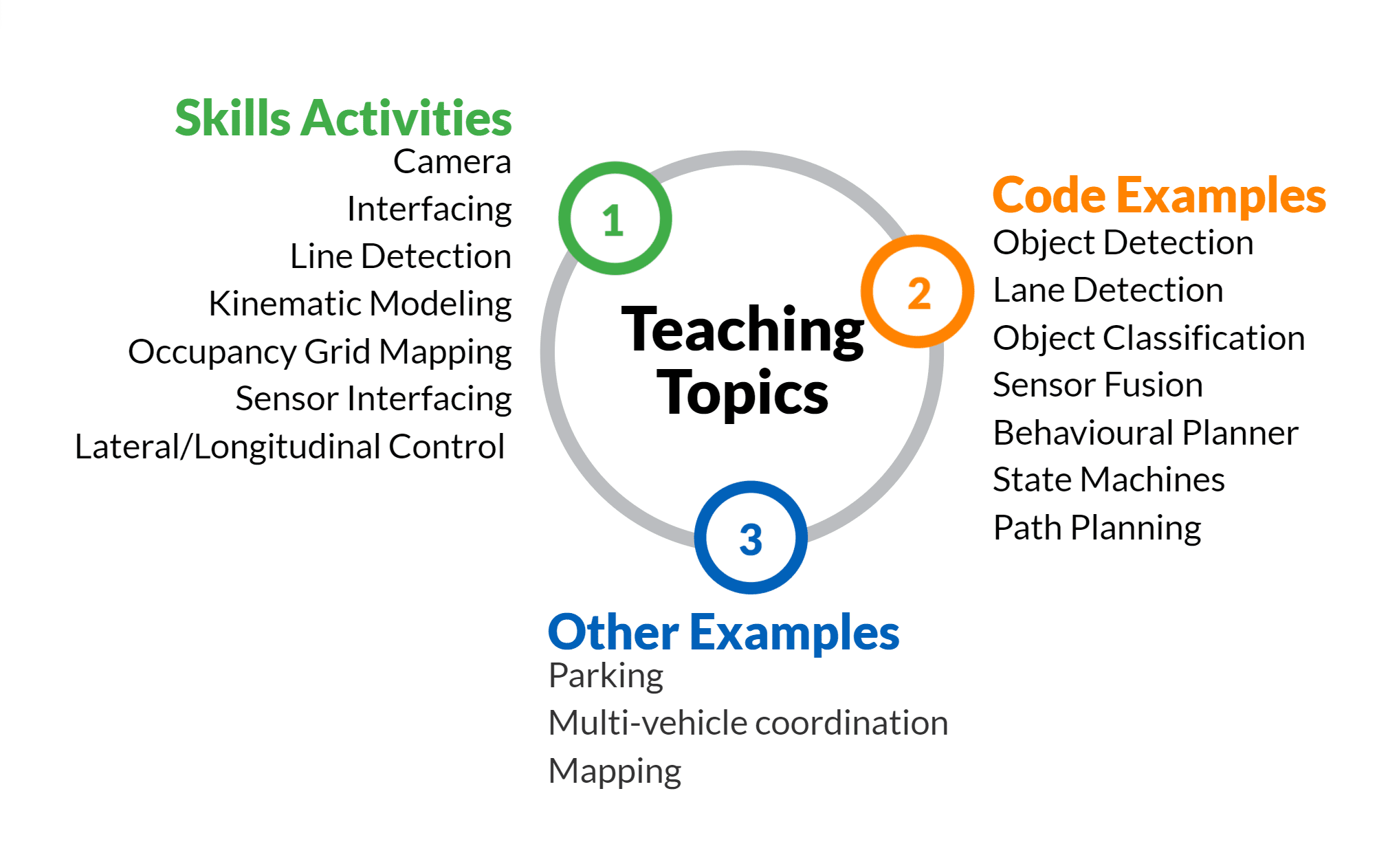
Relying on a set of software tools including Simulink®, Python™, TensorFlow, and ROS, the studio enables researchers to build high-level applications and reconfigure low-level processes that are supported by pre-built modules and libraries. Using these building blocks, you can explore topics such as machine learning and artificial intelligence training, augmented/mixed reality, smart transportation, multi-vehicle scenarios and traffic management, cooperative autonomy, navigation, mapping and control, and more.
| Dimensions | 39 x 21 x 21 cm |
| Weight (with batteries) | 2.7 kg |
| Power | 3S 11.1 V LiPo (3300 mAh) with XT60 connector |
| Operation time (approximate) | ~2 hours 11 m (stationary, with sensors feedback) |
| 30 m (driving, with sensor feedback) | |
| Onboard computer | NVIDIA® Jetson™ Orin AGX |
| CPU- 2.2 GHz 8-core ARM Cortex-A78 64-bit | |
| GPU- 930 MHz 1792-CUDA/56-TENSOR cores | |
| Memory- 32GB 256-bit LPDDR5 @ 204.8 GB/s | |
| LIDAR | LIDAR with 16k points, 5-15 Hz scan rate, 0.2-12m rang |
| Cameras | Intel D435 RGBD Camera |
| 360° 2D CSI Cameras using 4x 160° FOV wide angle lenses, 21fps to 120fps | |
| Encoders | 720 count motor encoder pre-gearing with hardware digital tachometer |
| IMU | 6-axis IMU (gyroscope & accelerometer) |
| Safety features | Hardware “safe” shutdown button |
| Auto-power off to protect batteries | |
| Expandable IO |
* **Subject to change |
| Connectivity | Wi-Fi 802.11a/b/g/n/ac 867 Mbps with dual antennas |
| 1x HDMI | |
| 1x 10/100/1000 BASE-T Ethernet | |
| Additional QCar feautres | Headlamps, brake lights, turn signals and reverse lights |
| Individually programmable RGB LED strip (33x LEDs) | |
| Dual microphones | |
| Speaker | |
| 2.7″ LCD TFT 400×240 for diagnostic monitoring |
Vehicles
- QCar 2*
- QCar*
- (single vehicle or fleet)
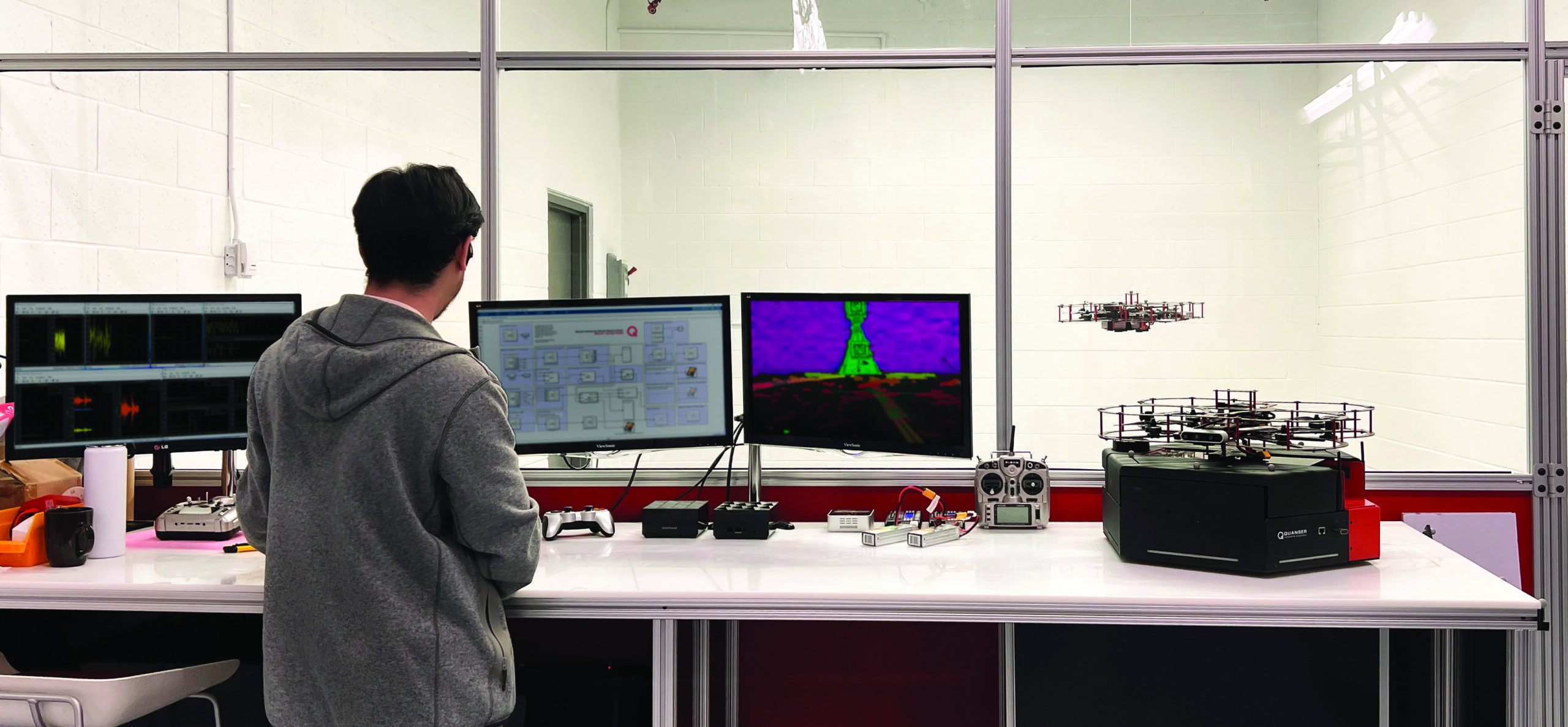
Ground Control Station
- High-performance computer with RTX graphics card with Tensor AI cores
- Three monitors
- High-performance router
- Wireless gamepad
- QUARC Autonomous license
Studio Space
- Driving map featuring intersections, parking spaces, single & double lane roads and roundabouts
- Supporting infrastructure including traffic lights, signs and cones
| Supported Software and APIs | QUARC for Simulink® |
| Quanser APIs | |
| TensorFlow | |
| Python™ 2.7 / 3 & ROS 2 | |
| CUDA® | |
| cuDNN | |
| TensorRT | |
| OpenCV | |
| Deep Stream SDK | |
| VisionWorks® | |
| VPI™ | |
| GStreamer | |
| Jetson Multimedia APIs | |
| Docker containers with GPU support | |
| Simulink® with Simulink Coder | |
| Simulation and virtual training environments (Gazebo and Quanser Interactive Labs ) | |
| Multi-language development supported with Quanser Stream APIs for inter-process communication | |
| Communication |
Related Products

QCar 2
Sensor-rich autonomous vehicle for self-driving applications.

QDrone 2
Quanser innovation unleashed in the autonomous vehicle research space

QLabs Virtual QCar
High fidelity digital twin in an interactive driving world

QCar
THIS PRODUCT IS NO LONGER AVAILABLE.
Autonomous Vehicles Research Studio
Jump-start Your Autonomous Vehicles Research
